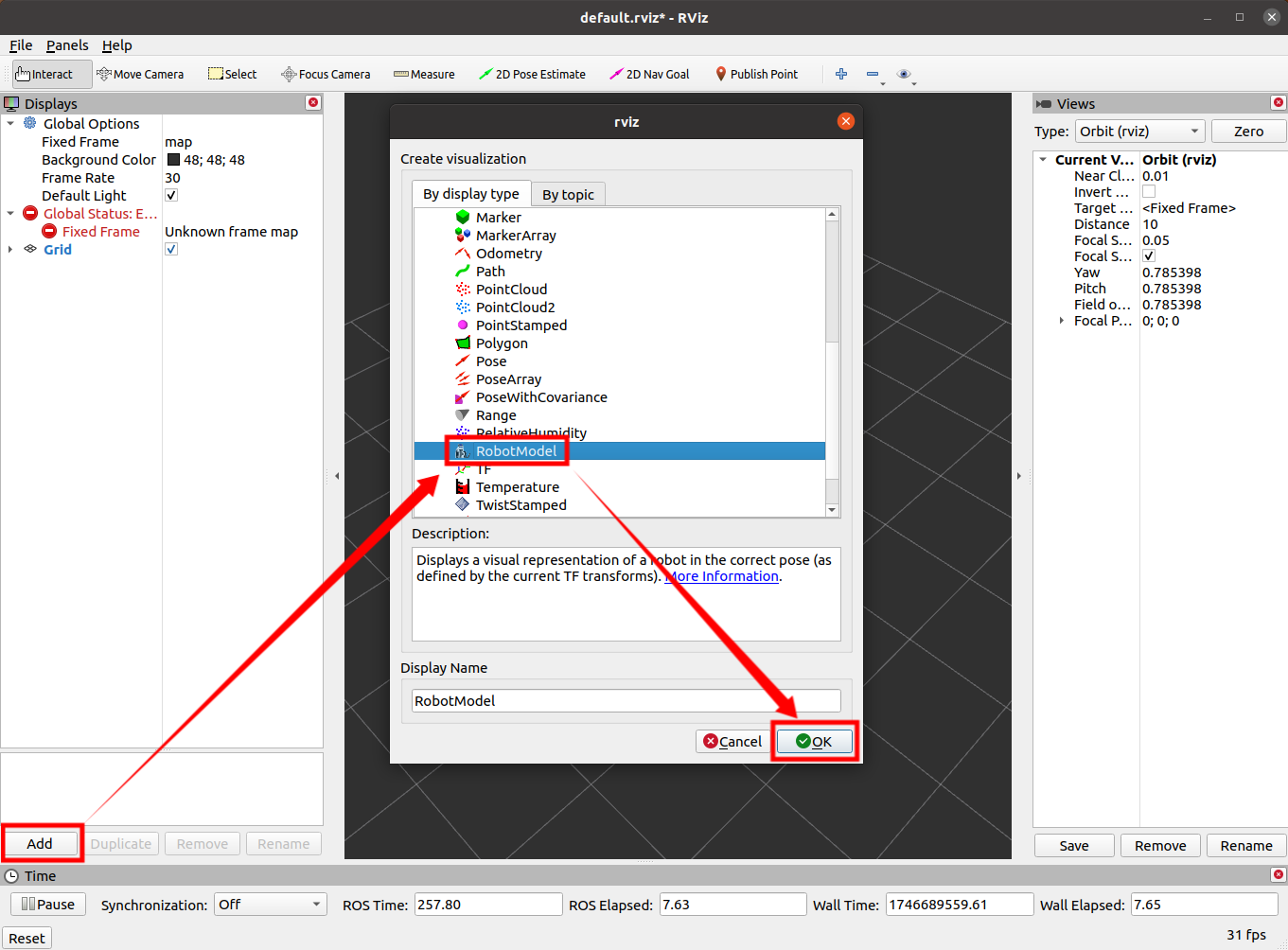
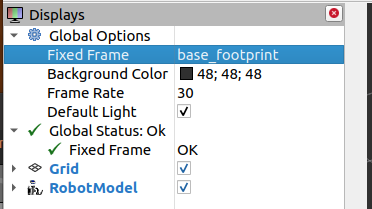
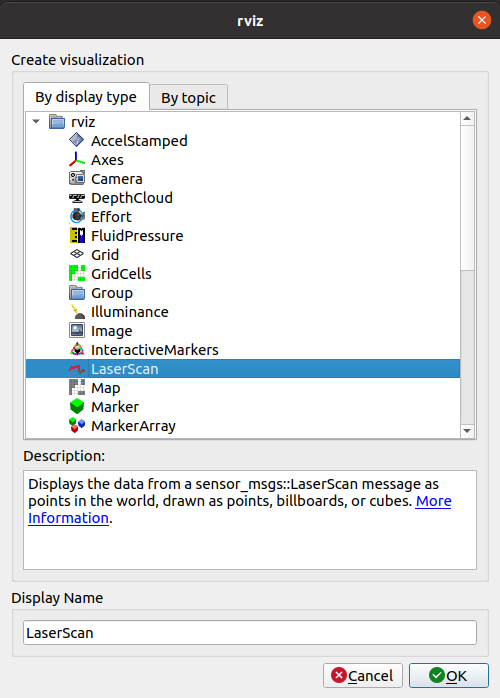
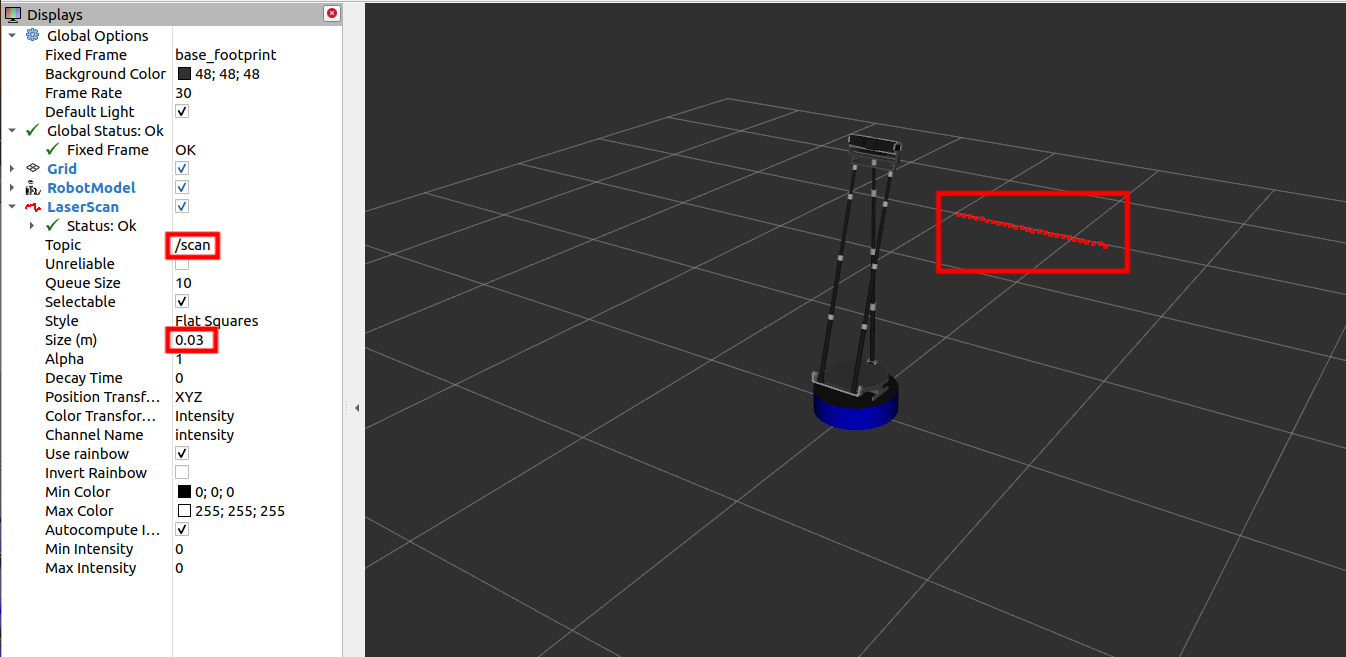
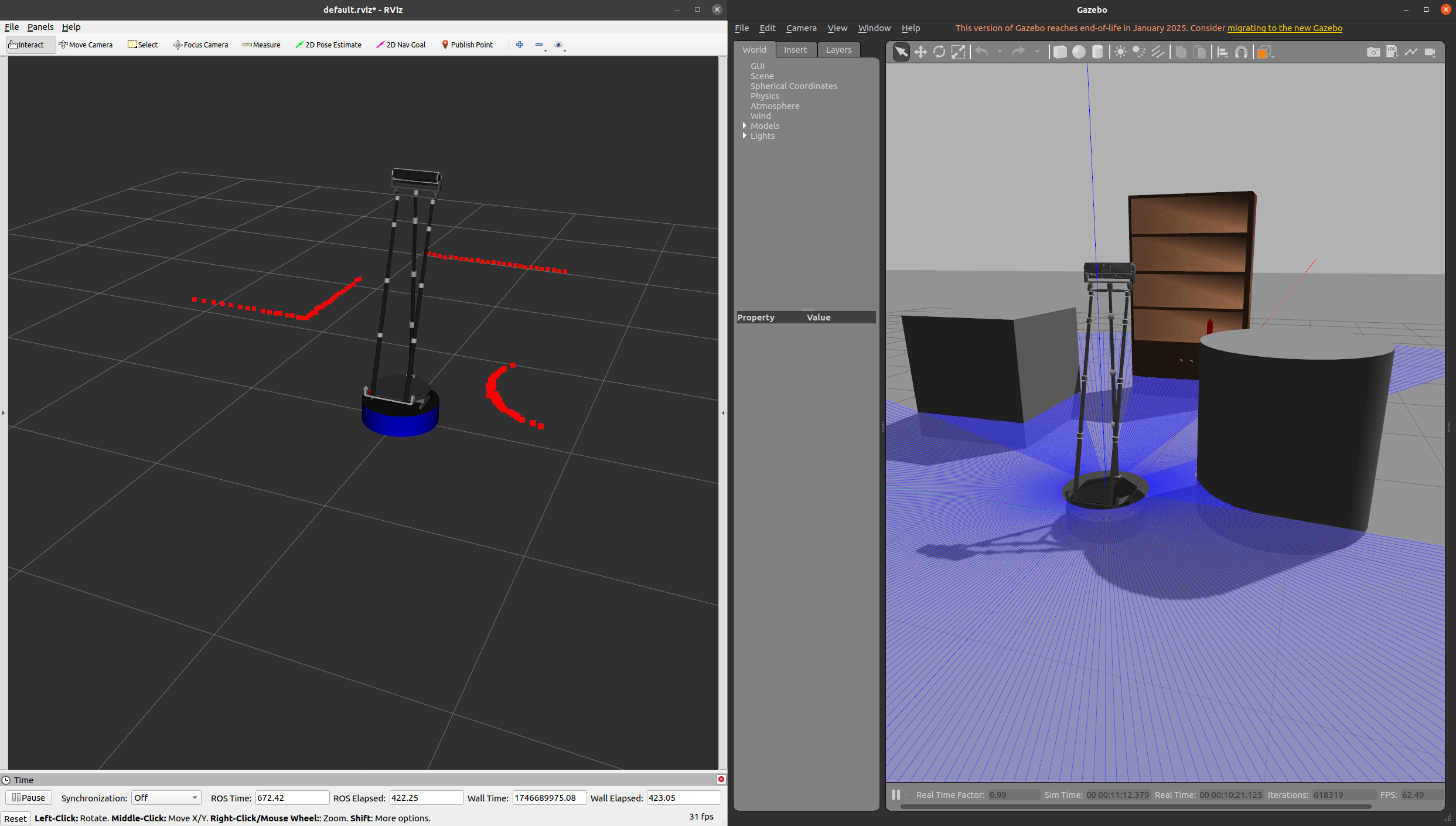
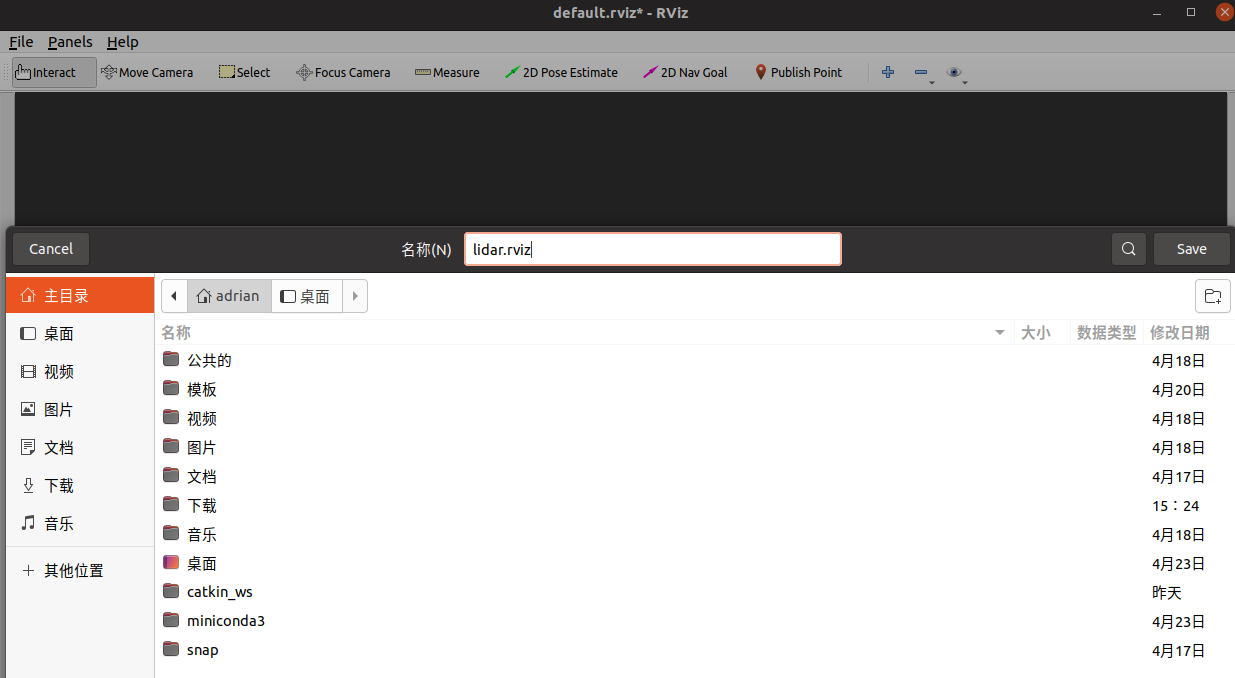
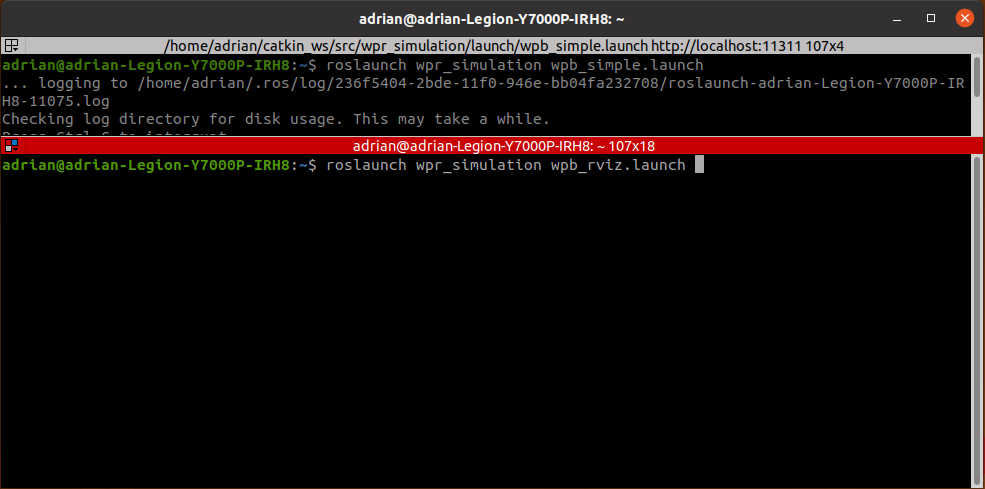
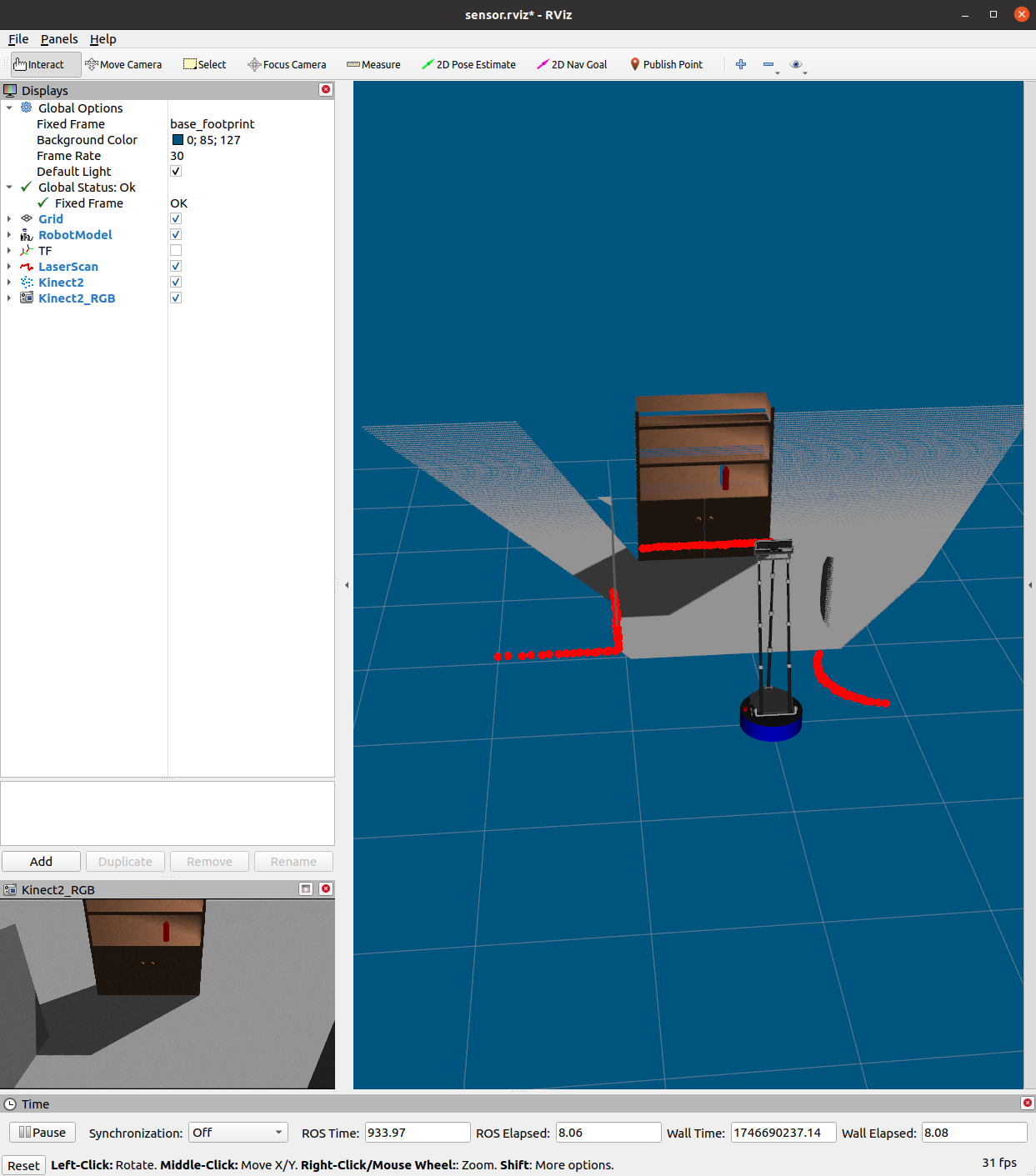
ROS—— 九、使用RViz观测传感器数据 2025-5-08 15:58 | ROS | 1,437 ・启动 RViz 先启动仿真软件,再另外开启终端,输入 rviz 启动程序 ・添加 visualization 如图所示: 若添加完后,显示的机器人是白色的,则将左侧栏中的【Fixed Frame】选择为【base_footprint】 相同的操作,添加激光雷达: 并如图所示修改左侧栏: 可见机器人前方出现一排红色点,即为 wpr_simulation 仿真软件中的柜子 不妨再增加一些障碍物,观察现象: ・保存并启动 .rviz 文件 保存rviz文件后,每次不用重新配置可视文件,直接打开即可: 也可以使用软件官方带的rviz配置文件: 赞赏


我会一直视奸你,直到永远。🙃