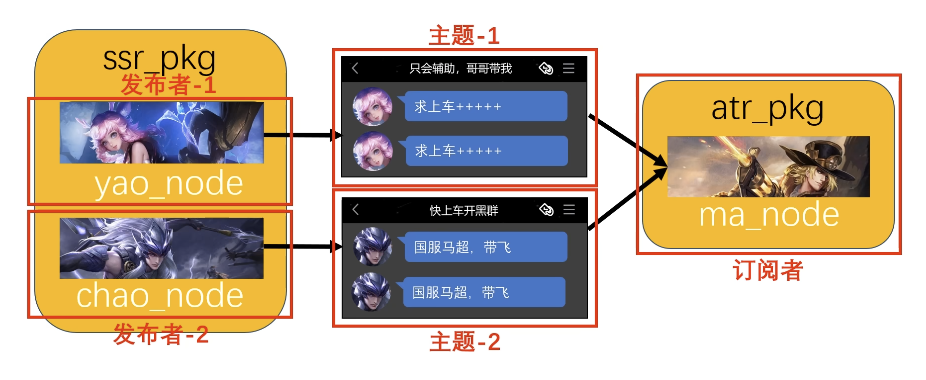
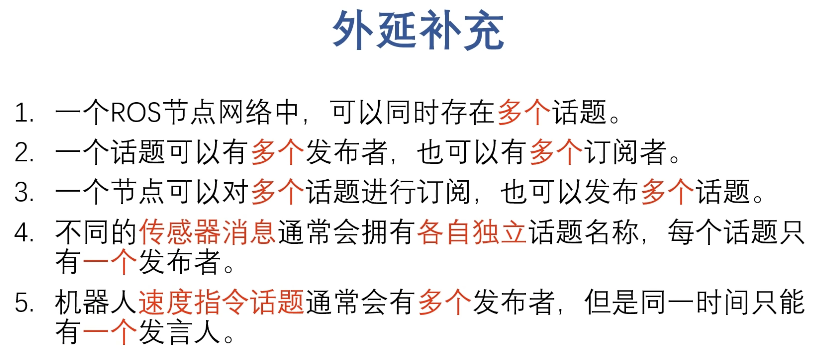
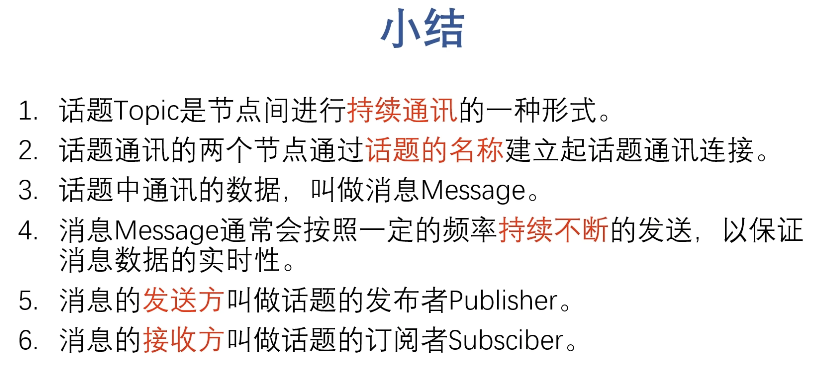
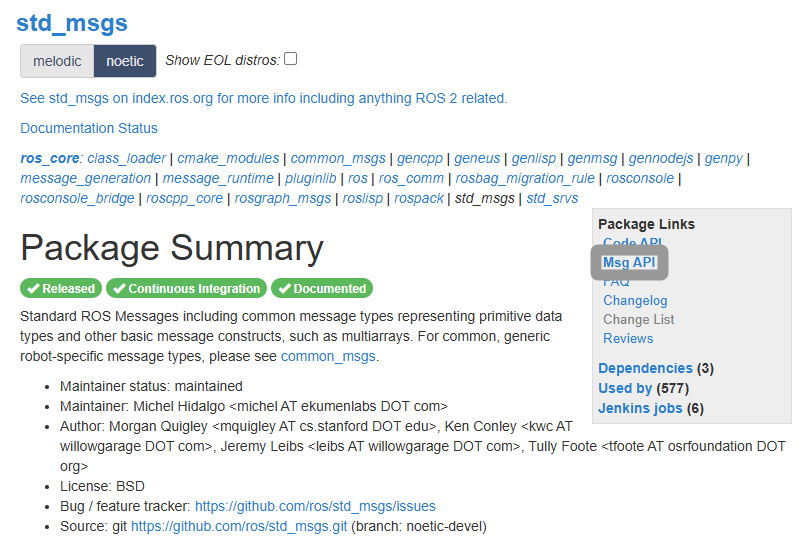
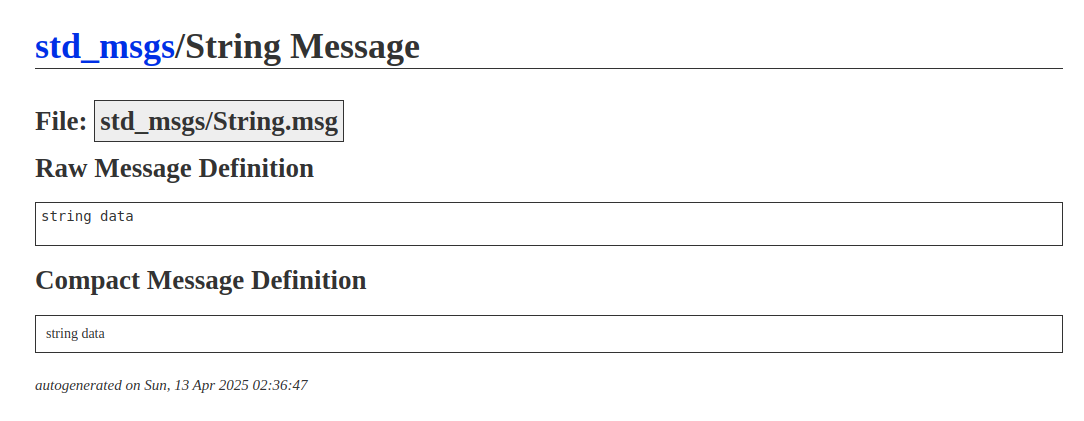
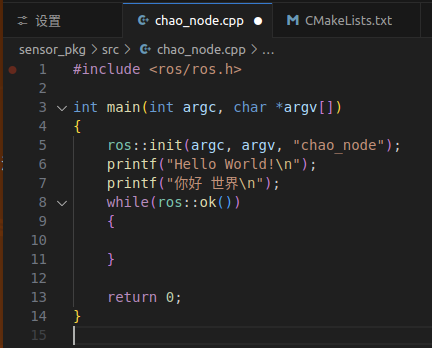
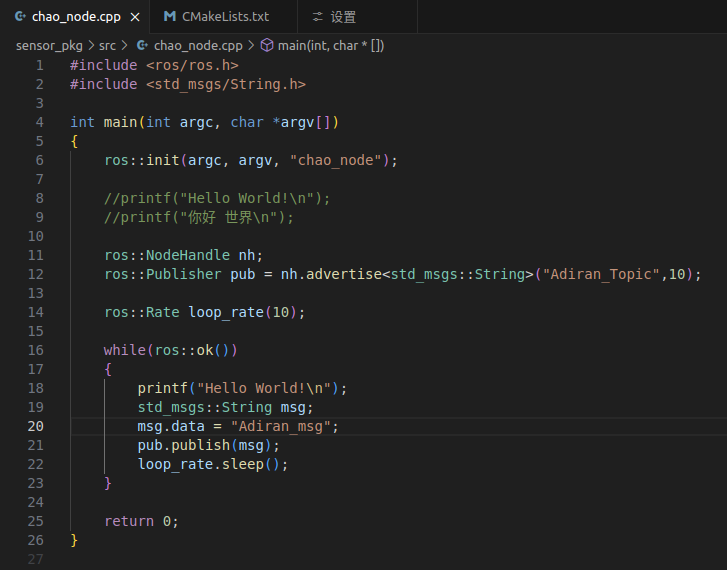
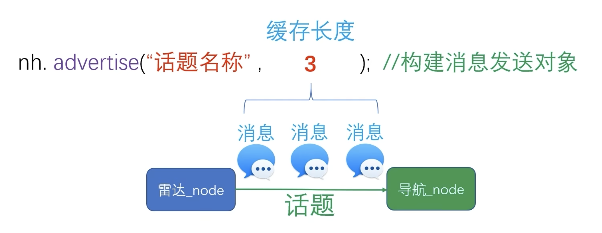
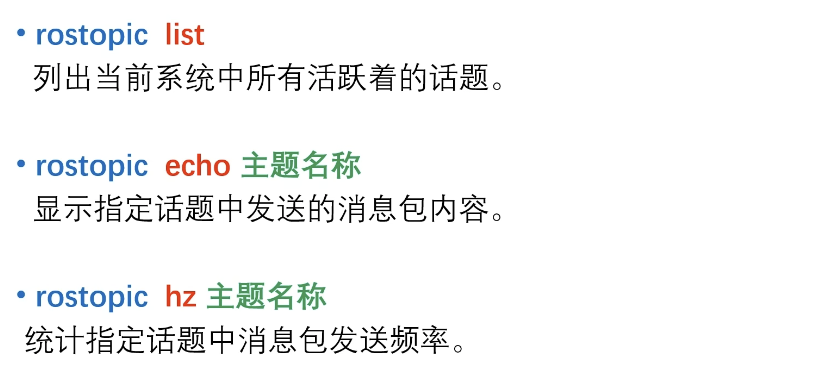
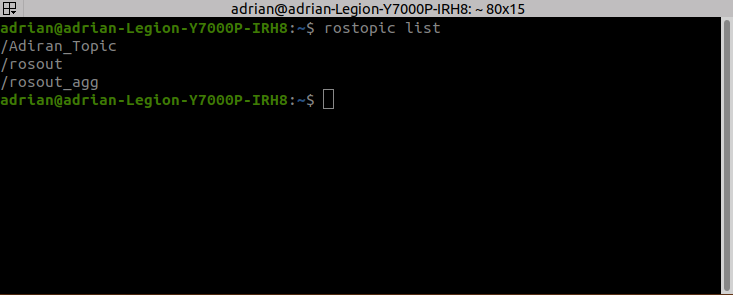
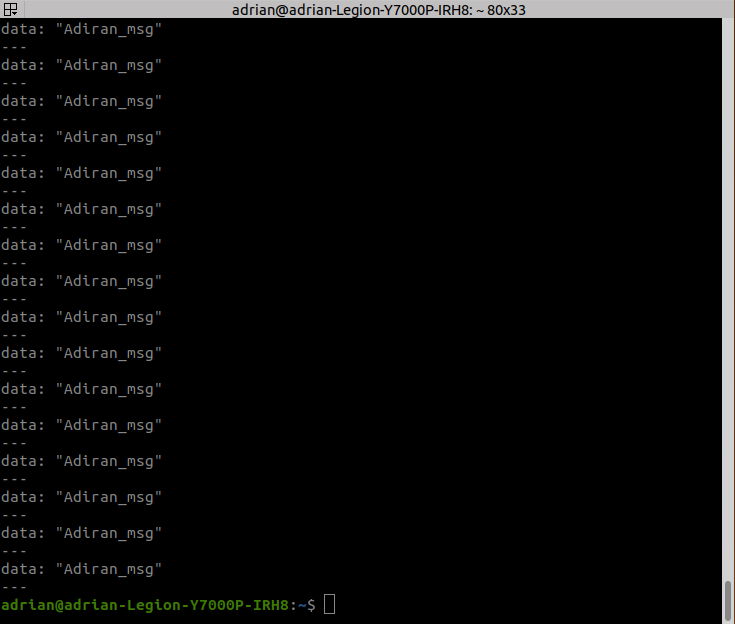
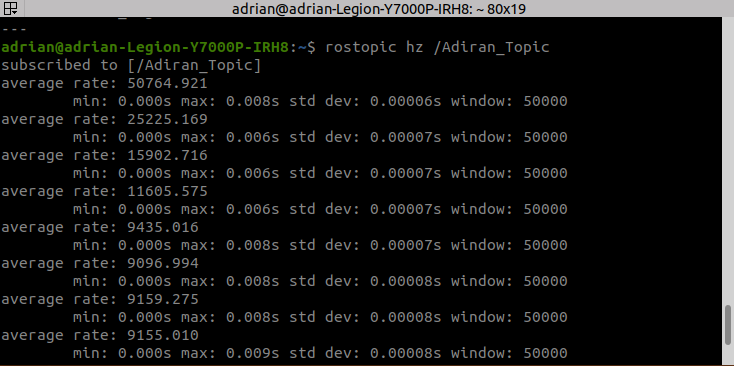
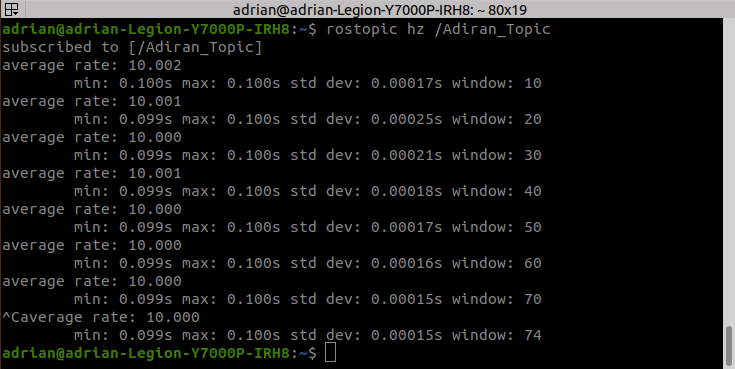
ROS——二、Publisher发布者C++实现 2025-4-21 21:26 | ROS | 1,388 ·什么是Topic? 什么是Message? 这里直接采用b站up主——机器人工匠阿杰,课程中的图片 ·确定消息数据类型 在导入依赖包时,有一个文件叫做std_msgs,这个依赖包就是规定发送数据类型的 ROS的pkg下载网站:https://index.ros.org/ 随后可选择想要发送的消息类型,并且可以具体查看代码。比如我们这次想要发送字符串数据: ·修改节点cpp文件 修改前: 修改后: nh.advertise:构建消息发送对象Adrian_Topic:话题名称Adrian_msg:发送的信息loop_rate:发送消息频率 启动ROS核心,rosrun这个Node ·rostopic函数使用 ——rostopic list ——rostopic echo ——rostopic hz 未用 loop_rate 限制发送频率前(频率为9155-50764): 限制后(频率固定为10): 赞赏