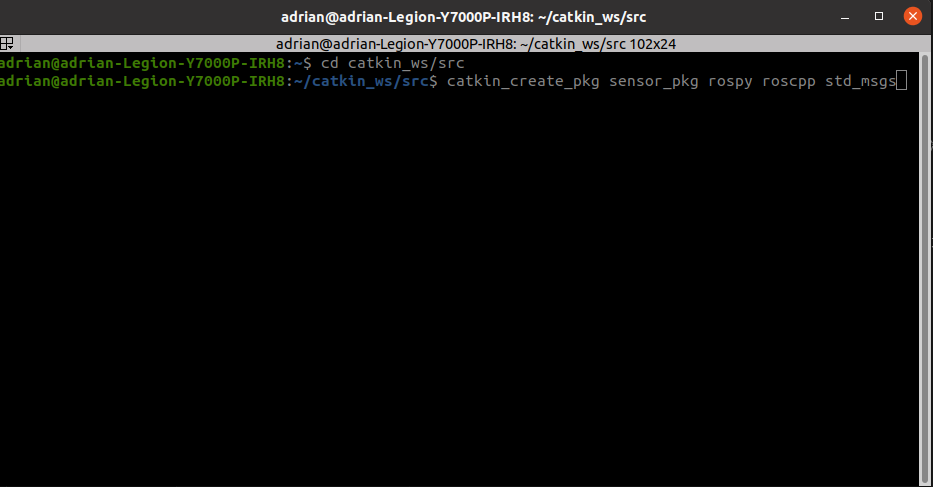
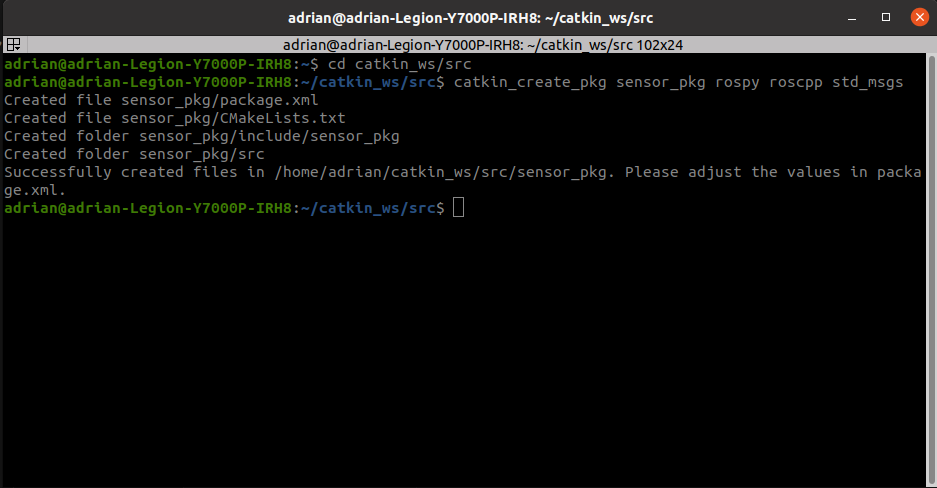
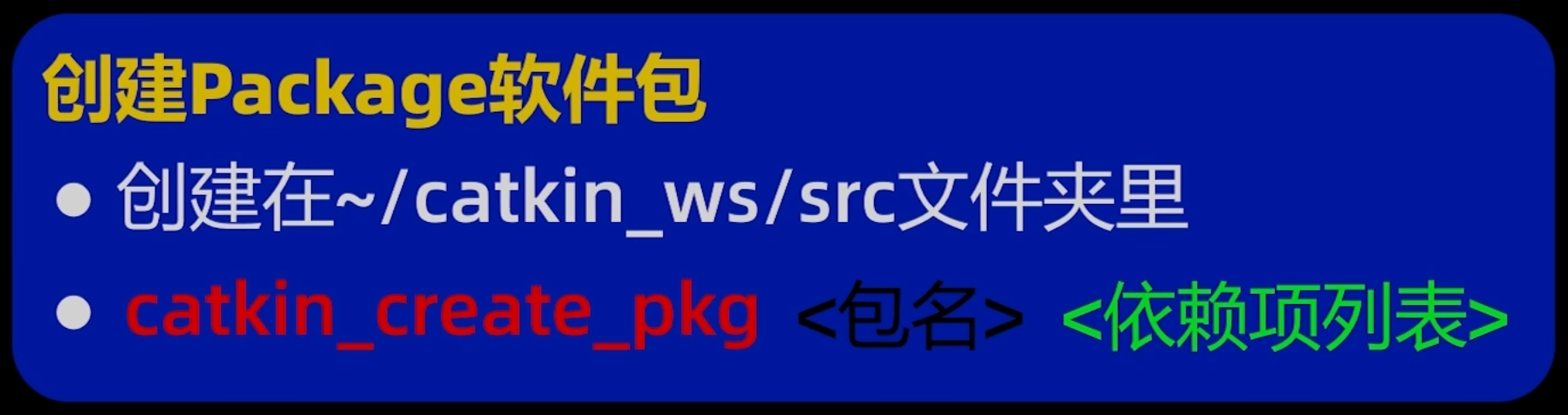
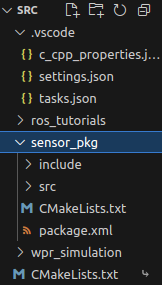
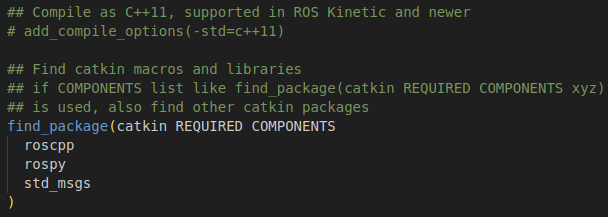
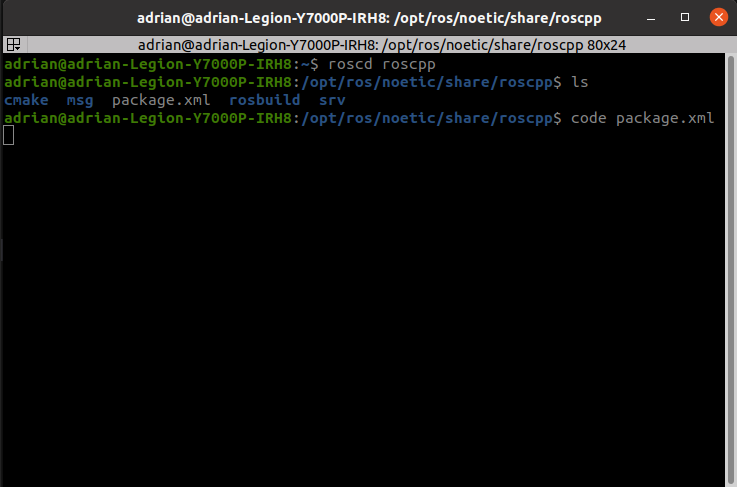
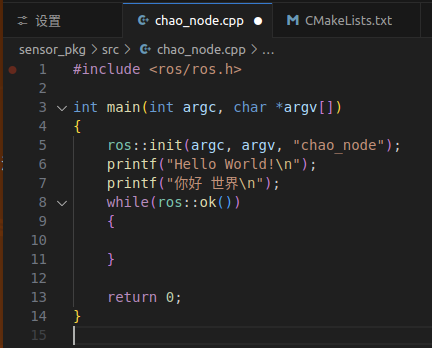
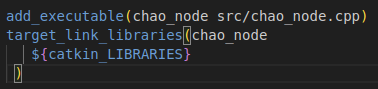
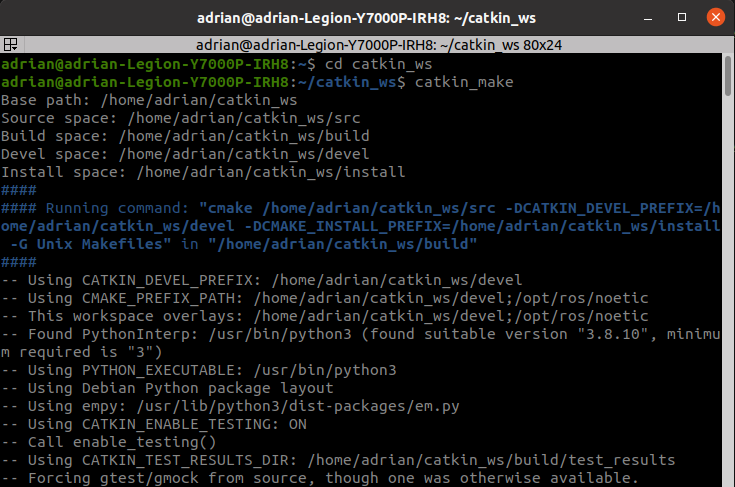
ROS —— 一、创建Package包与Node节点 2025-4-21 0:57 | ROS | 1,422 ·使用catkin_create_pkg创建一个软件包 先进入catkin_ws/src文件夹,在该文件夹下创建软件包 打开vscode,可在其中发现我们创建的pkg与其中的依赖项 ——使用roscd函数查找依赖包路径 ·在软件包的src文件夹下创建一个节点的cpp源码文件 先创建一个node的cpp文件 在节点的源码文件里include包含ros的头文件,并且如下图所示创建main函数 ·在CMakeLists.txt中设置节点源码的编译规则 在CMake文件中找到build 找到下列两个函数,并将函数复制,放在文件最后 将函数进行参数修改,如下 ·编译运行 若编译报错,可能是未加下一句代码在.bashrc文件中,加上即可 若不想通过vscode编译,可使用catkin_make函数编译 roscore启动ROS核心 rosrun运行节点 ps:上面的结果为未加while(ros::ok())函数的结果,下面为加上后的结果 赞赏