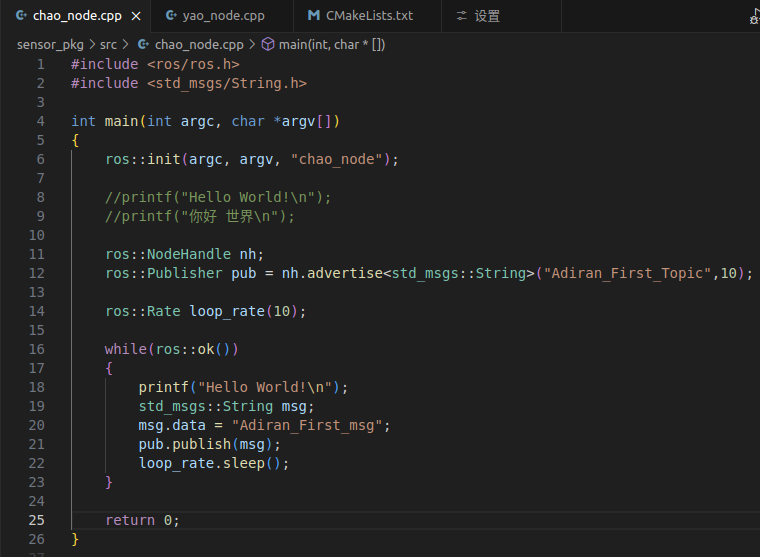
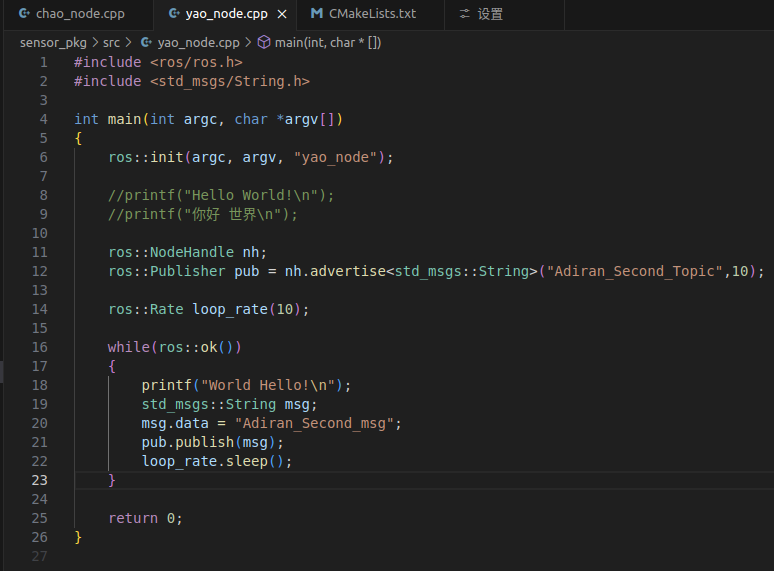
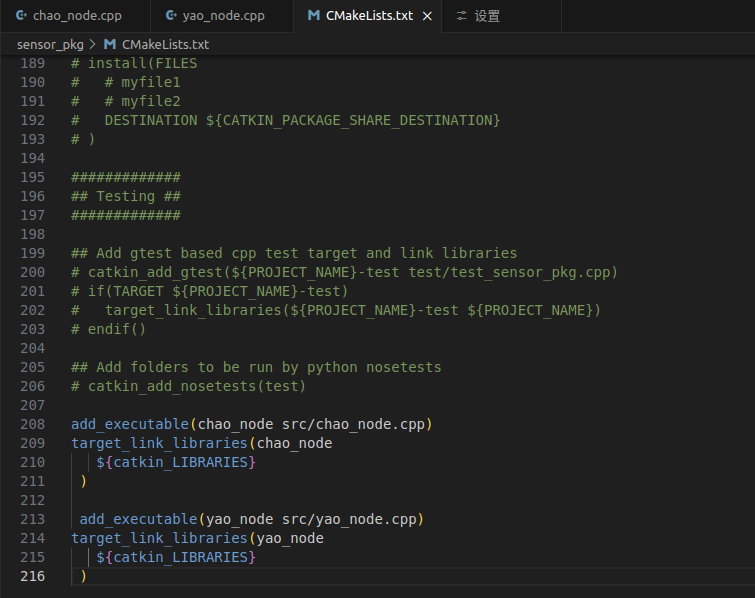
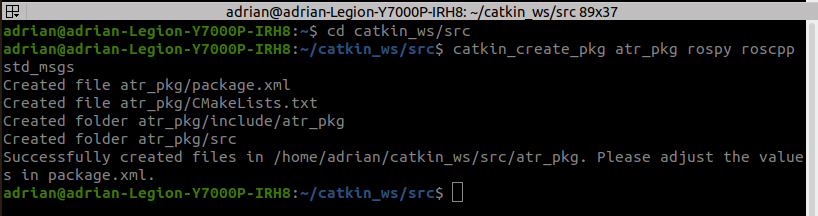
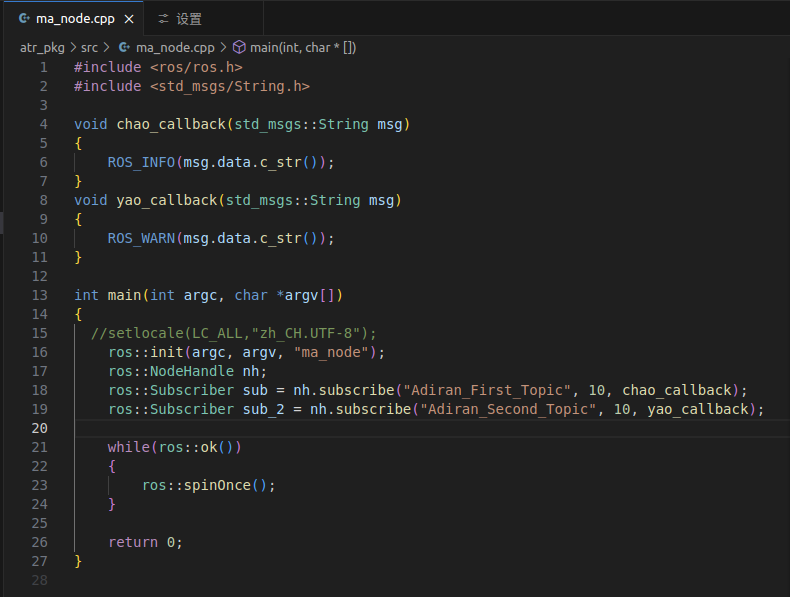
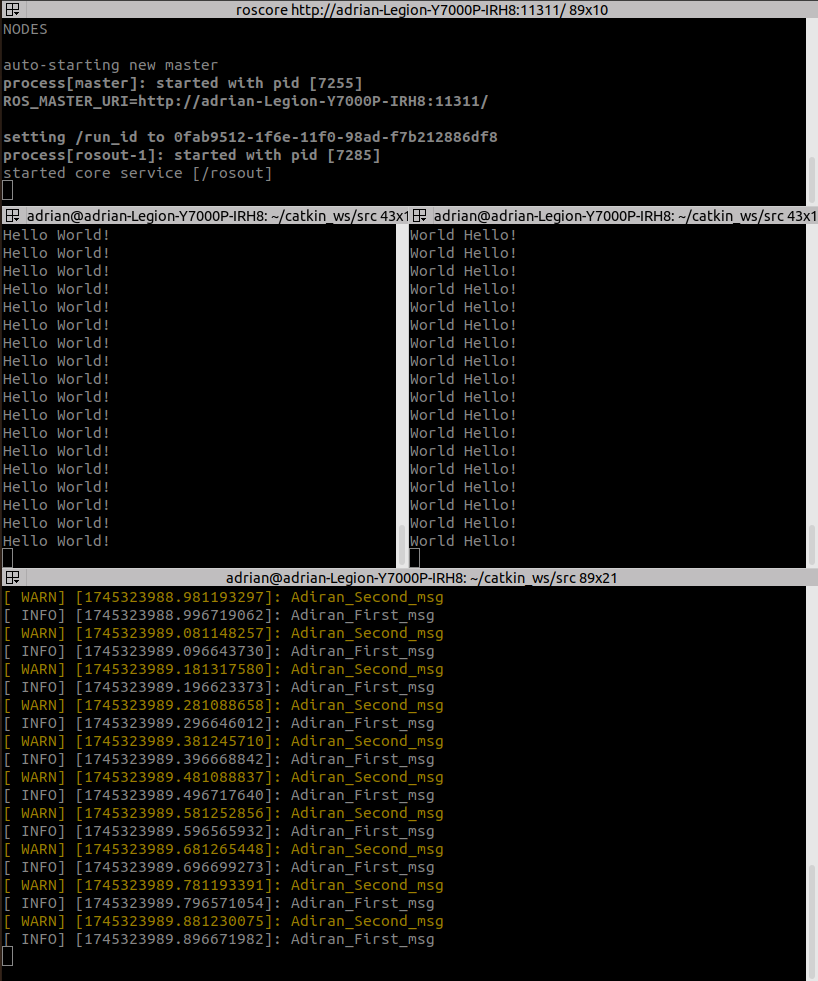
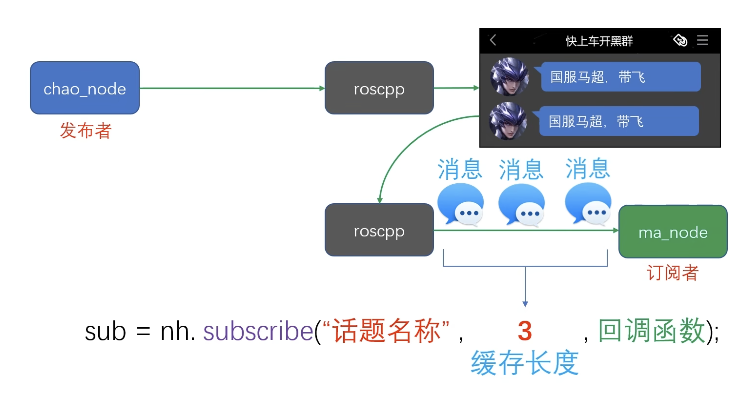
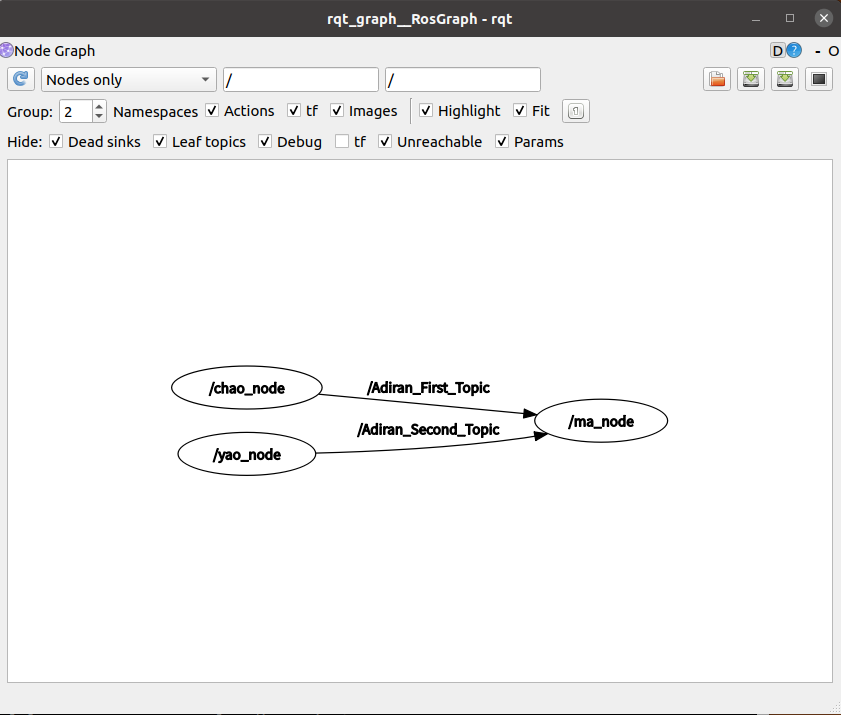
ROS——三、Subscriber订阅者C++实现 2025-4-22 20:49 | ROS | 892 ・重新创建一个新的发布者,并修改chao_node的代码 chao_node: yao_node: CMake: ・使用 catkin_create_pkg 创建一个软件包 如 ROS —— 一、创建Package包与Node节点 中所示,创建pkg包作为订阅者 ・在软件包的 src 文件夹下创建一个节点的 cpp 源码文件 订阅端程序如下: 运行结果如下: 读者可自行改变发布程序中的发送频率,观察ma_node运行后的结果有何不同 ——nh.subscribe ——callback 回调函数 有点类似于单片机中的外部中断回调函数,自行了解即可 ——ROS_INFO / ROS_WARN 输出带有时间戳的结果 ——setlocale( LC_ALL, " ZH_CH.UTF-8 " ); 若需要输出中文字符,即可加上这一句 ——ros : : spinOnce( ); 函数解释具体详见该博客:ROS C++ : 使用 ros::spin() 和 ros::spinOnce(),实现单线程处理ROS消息 ・rqt_graph 命令 该命令可以让ROS显示当前工作的Node,pkg,Topic和msg之间的关系,非常好用且重要,务必记下来!!!! 代码可在我的github库中拿取 赞赏