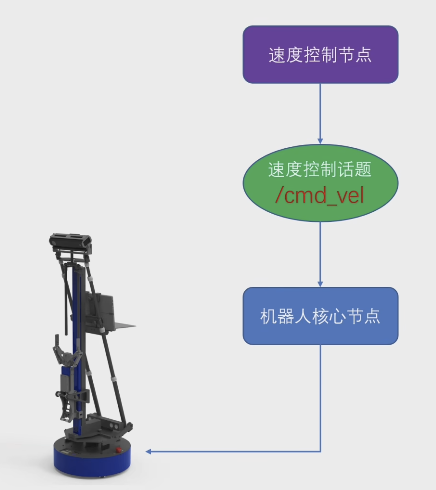
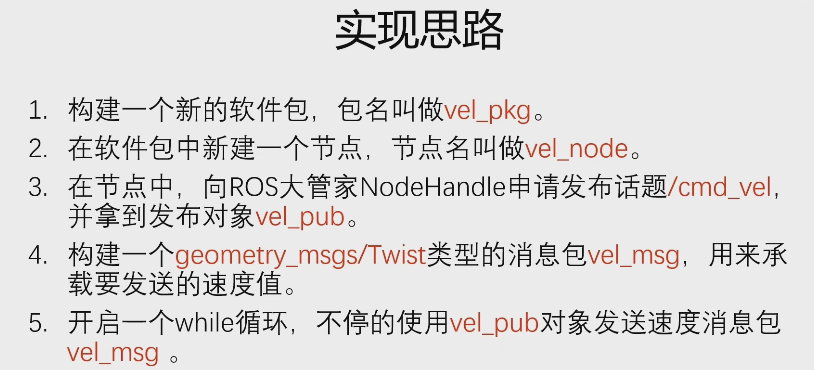
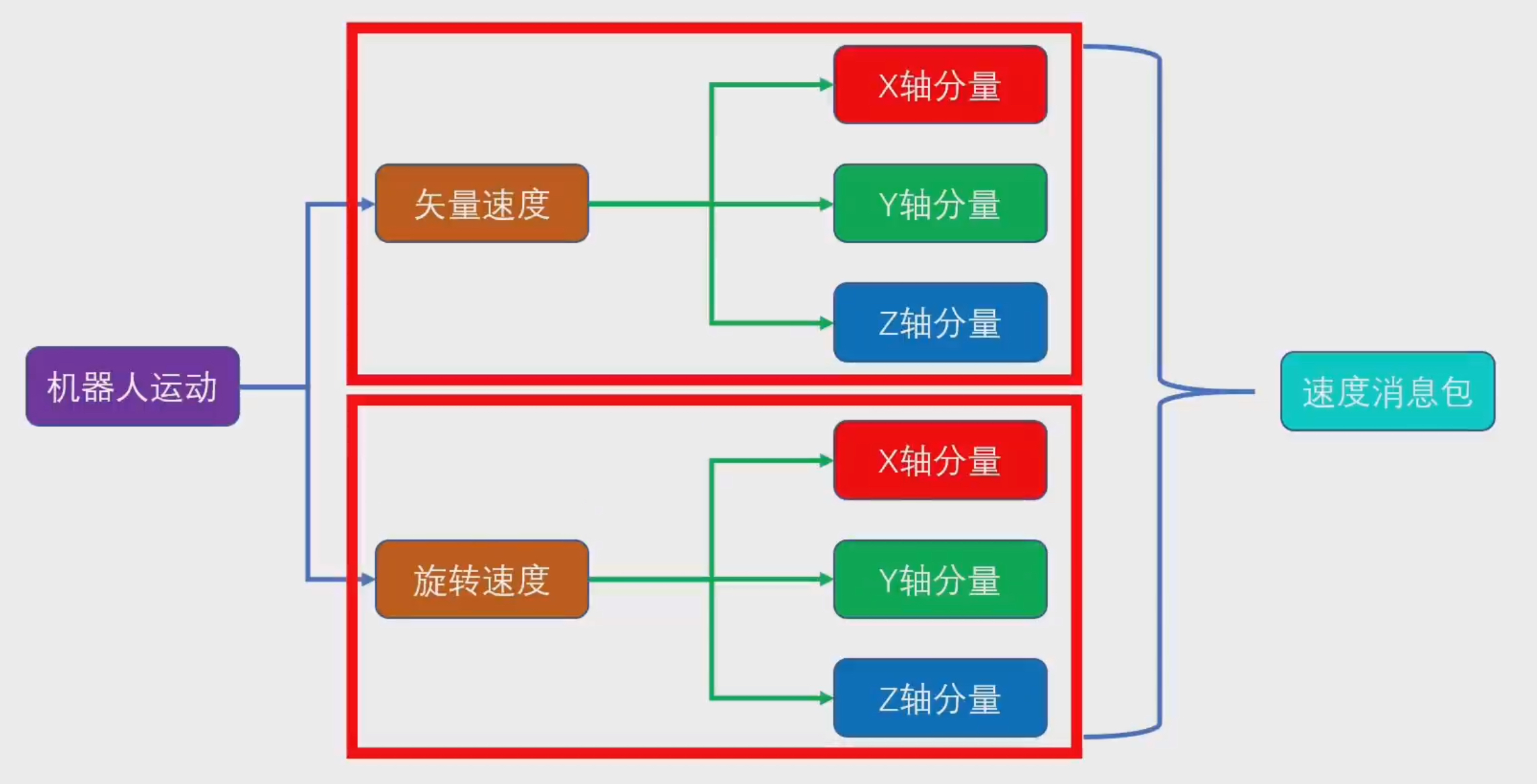
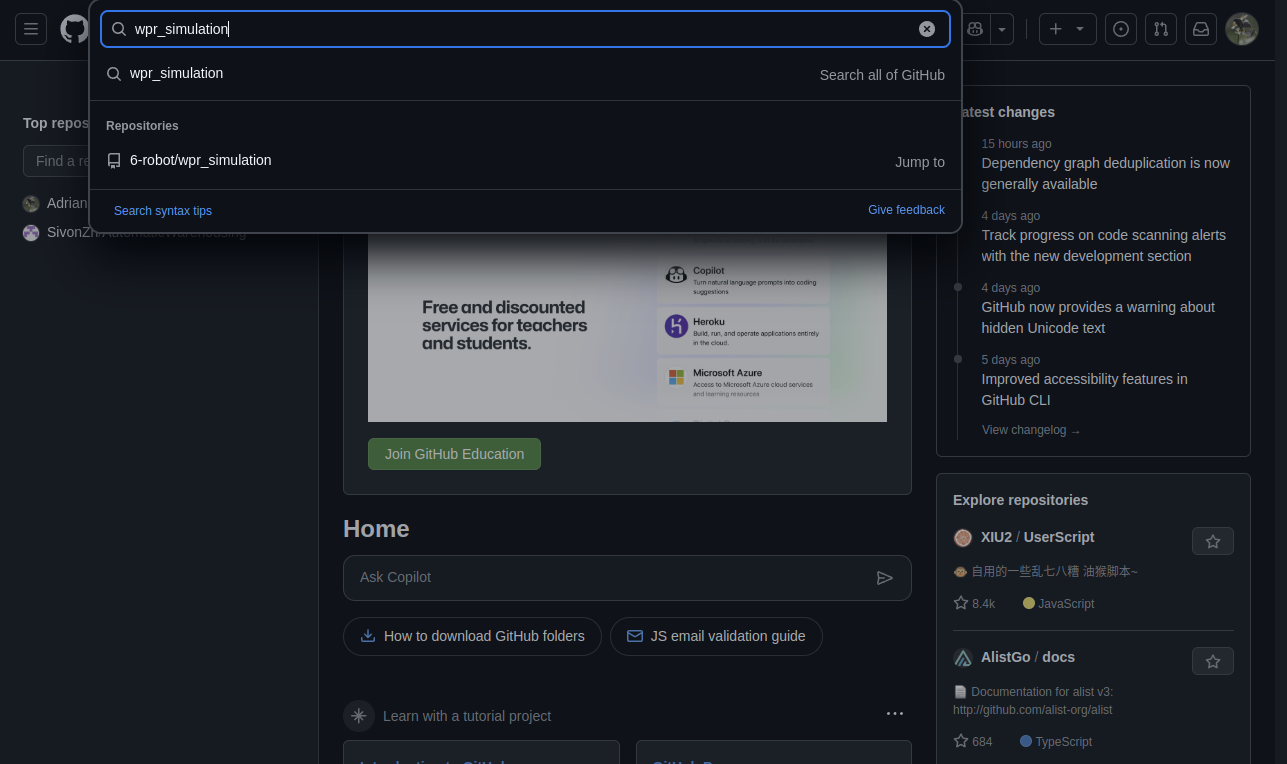
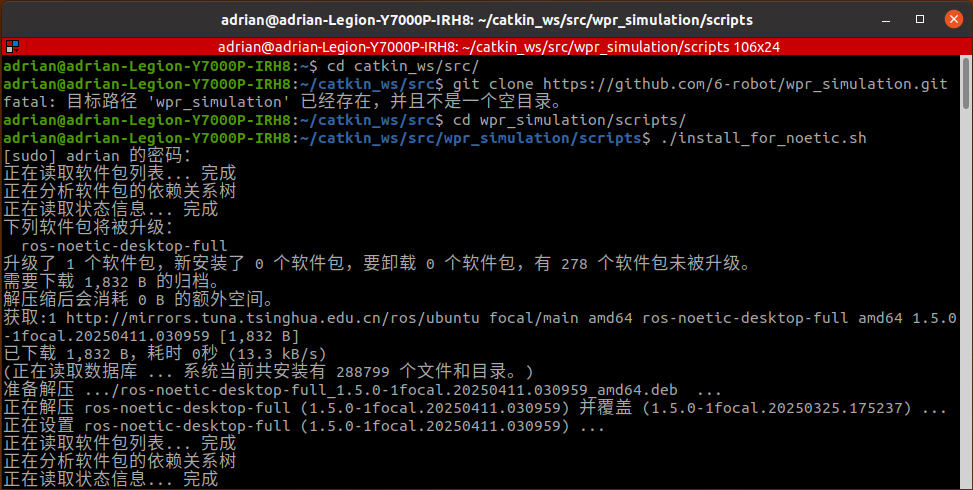
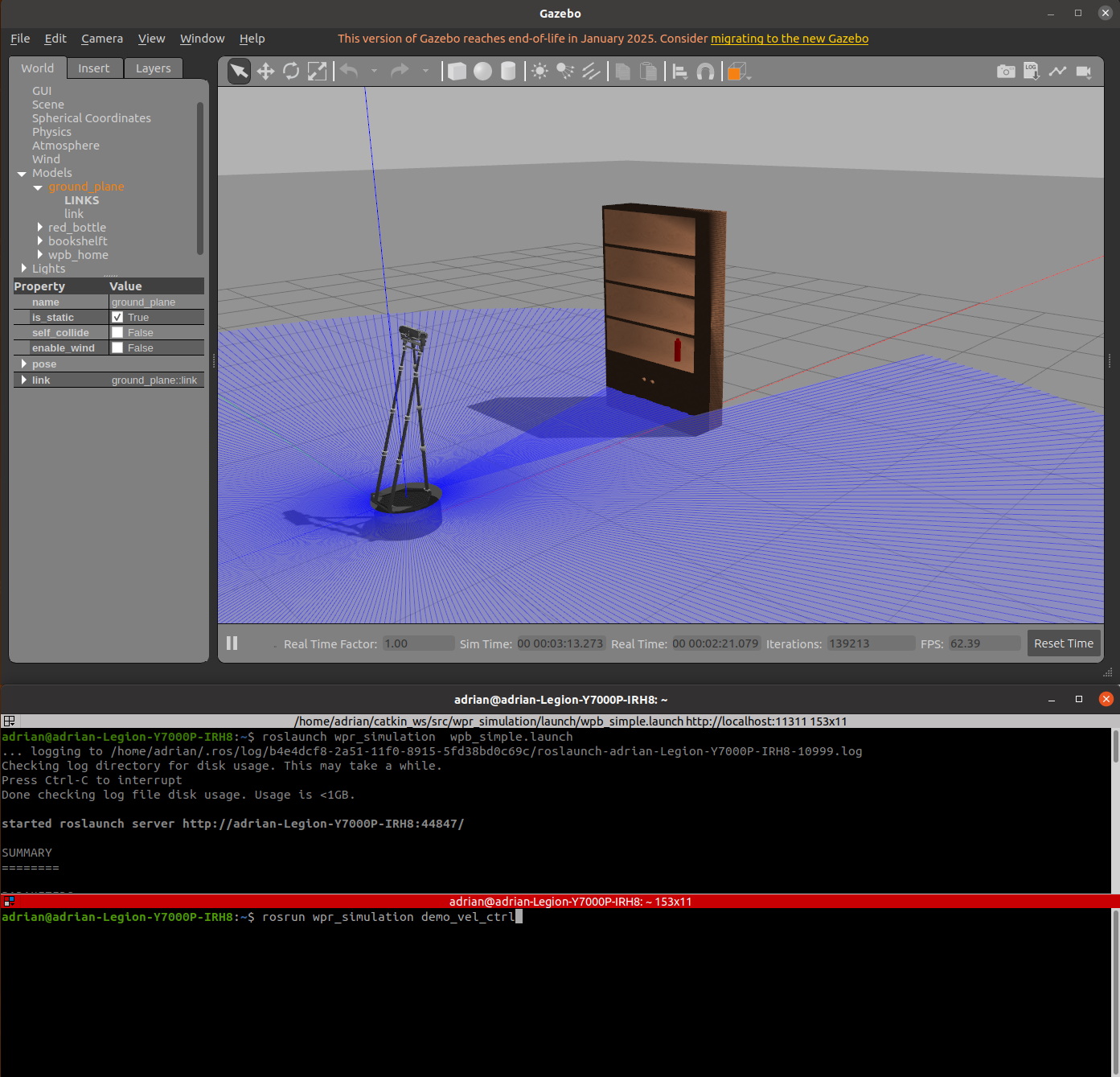
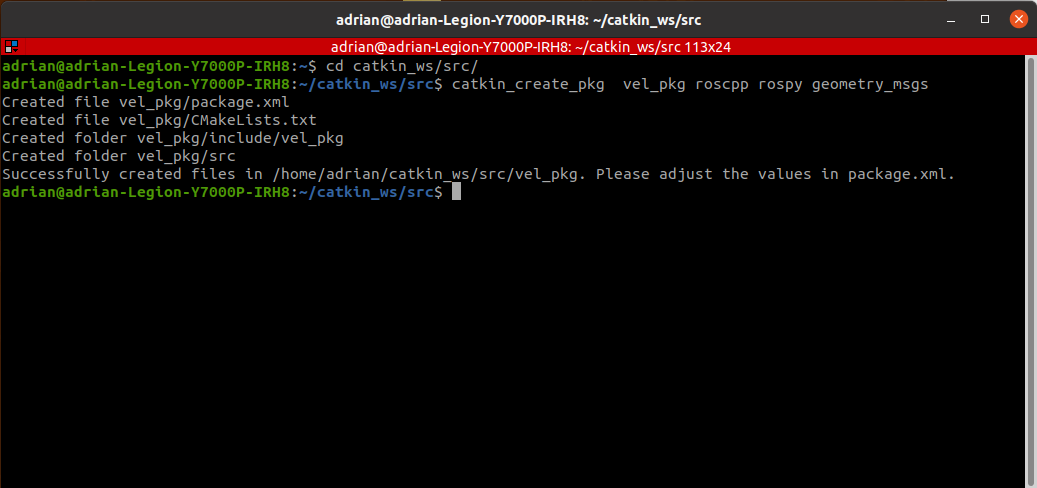
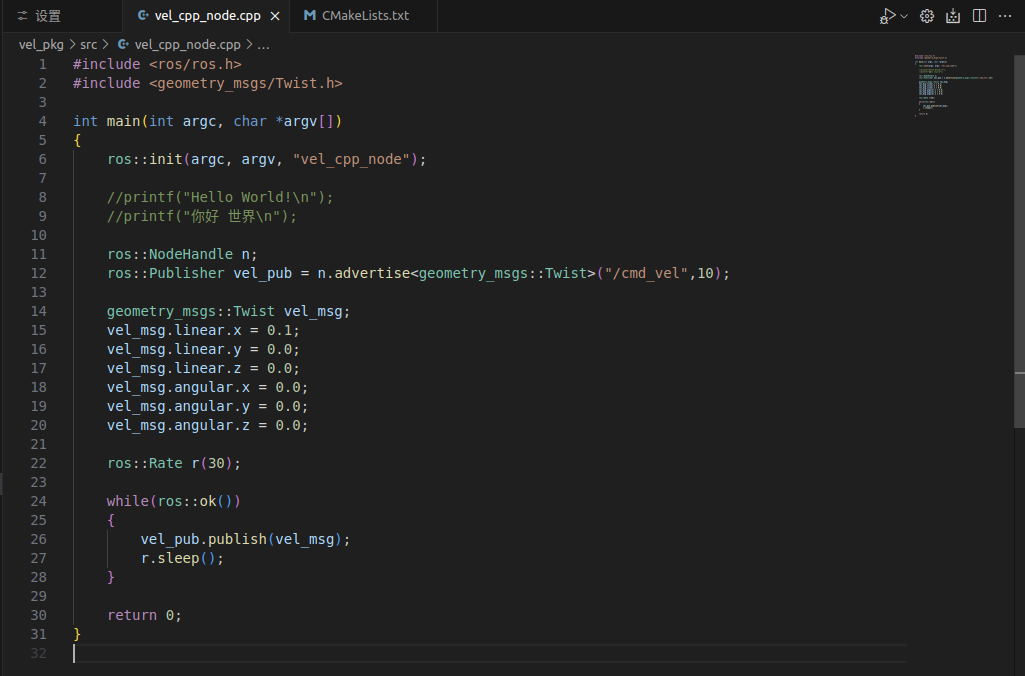
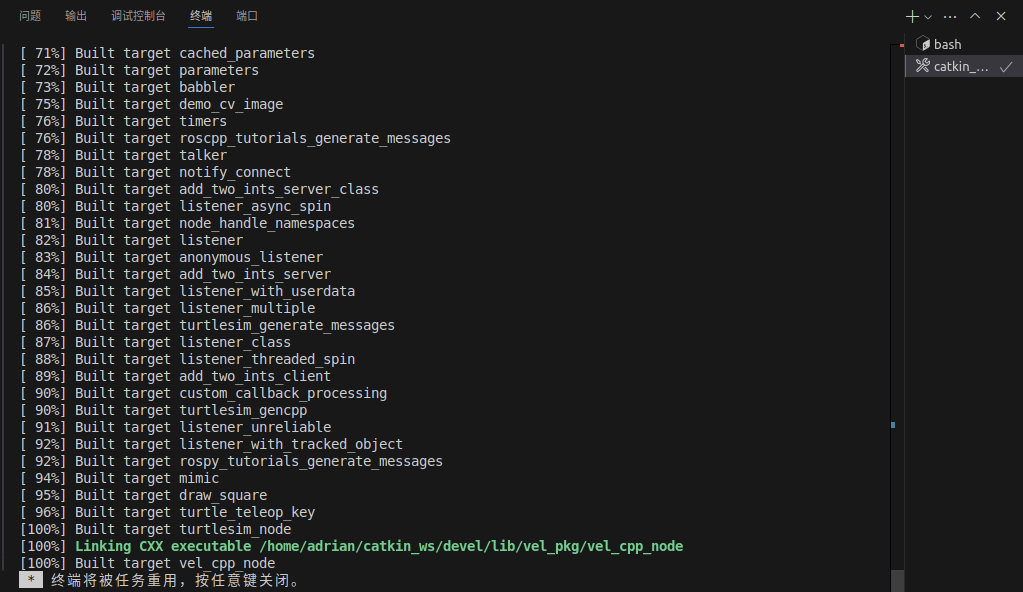
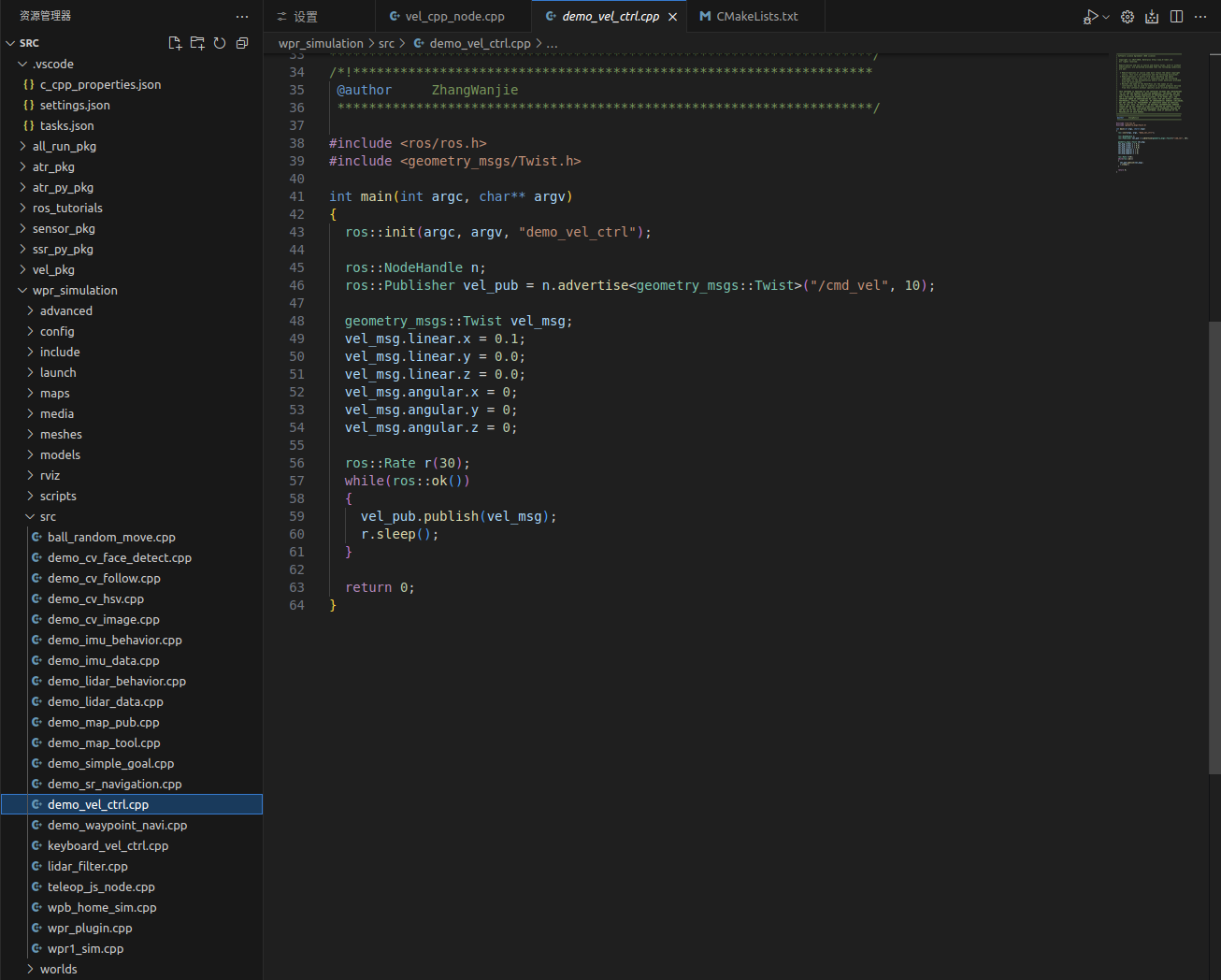
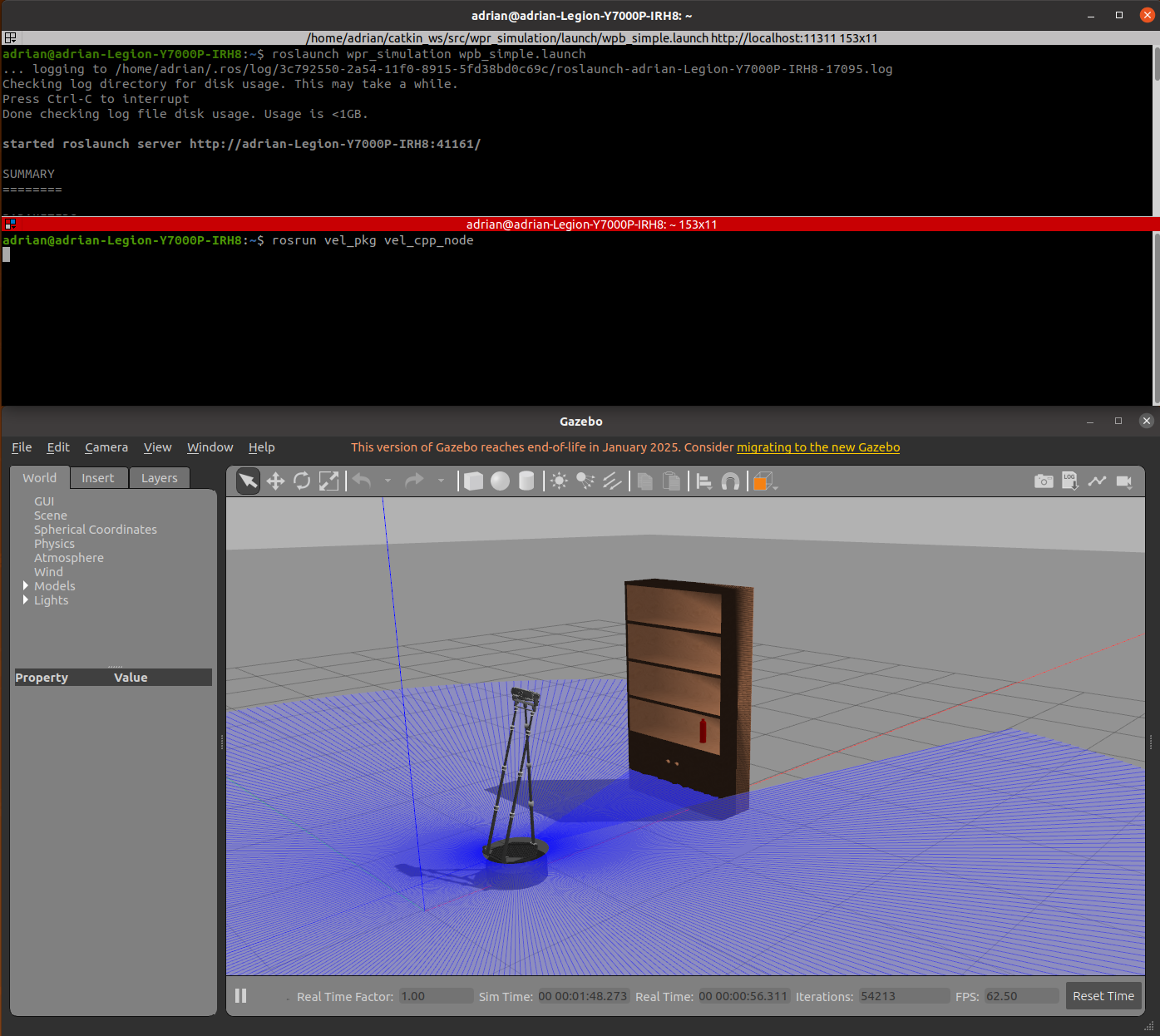
ROS—— 七、机器人运动控制C++实现 2025-5-06 16:58 | ROS | 1,450 ・控制简介 其中的 geometry_msgs 具体见链接中内容 上图为Twist类型消息包内容 ・wpr_simulation 仿真包 ——下载 安装流程如下: 进入github网站,搜索wpr_simulation 复制code链接 代码按照如下所示输入( 用tab补全较方便 ) 由于我已经安装过该软件包,故显示已经存在 ——启动测试 roslaunch启动该节点 运行该仿真包内部原有的demo程序,让机器人慢慢向前走 若机器人慢慢向前走,则wpr_simulation安装成功 ・使用 catkin_create_pkg 创建 vel_pkg 包 具体步骤见ROS —— 一、创建Package包与Node节点 如上图所示,在vel_pkg的src文件夹中创建vel_cpp_node.cpp文件 ・编写.cpp程序 【修改编译文件】 注释内容我的cpp版本不用添加随后编译 若不管怎么修改,编译始终有误,可以寻找wpr官方的demo程序进行复制,路径如下: ・运行节点 可以看到与该文章刚开始运行 demo 节点一样的现象,试验成功。读者可自行修改 linear 的 xyz 轴和 angular 的 xyz 轴的数值来查看效果 代码可在我的github库中拿取 赞赏