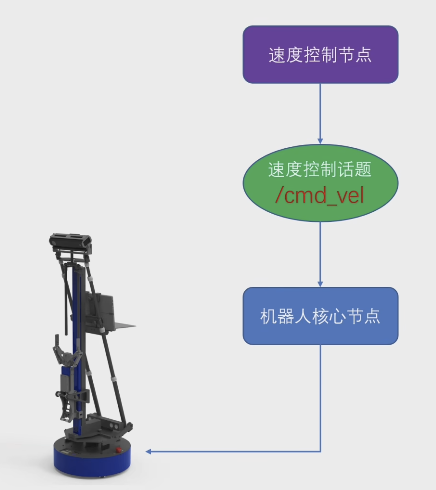
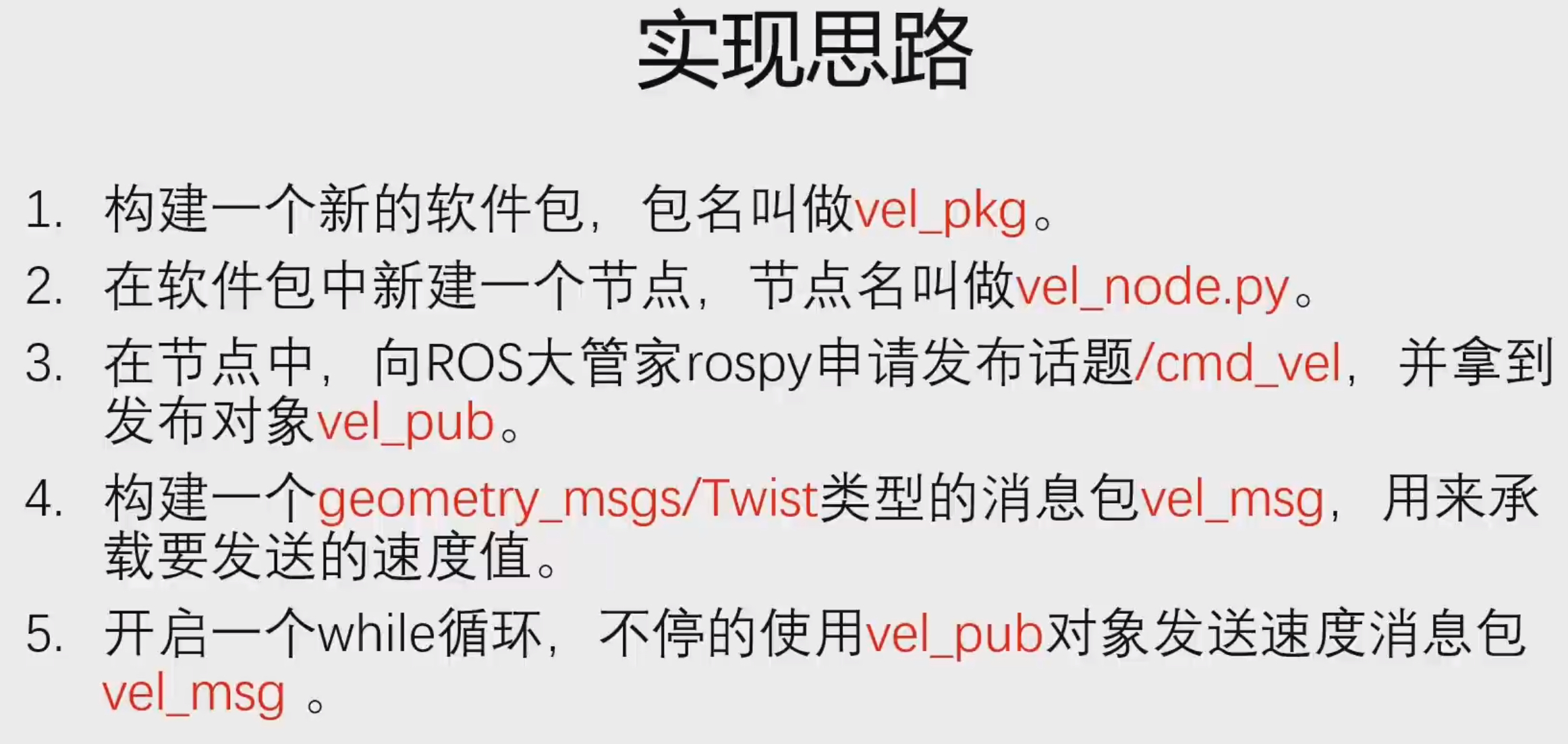
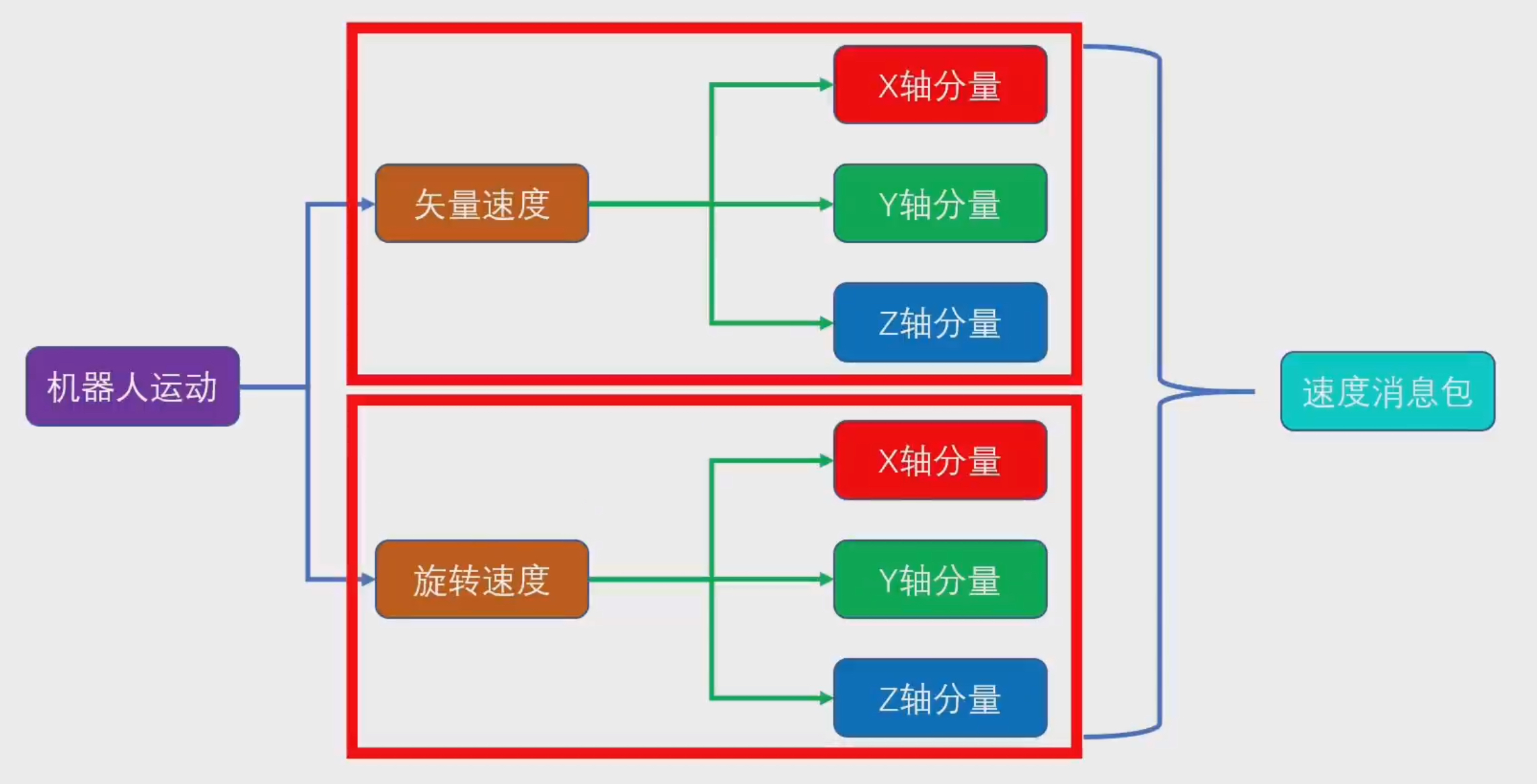
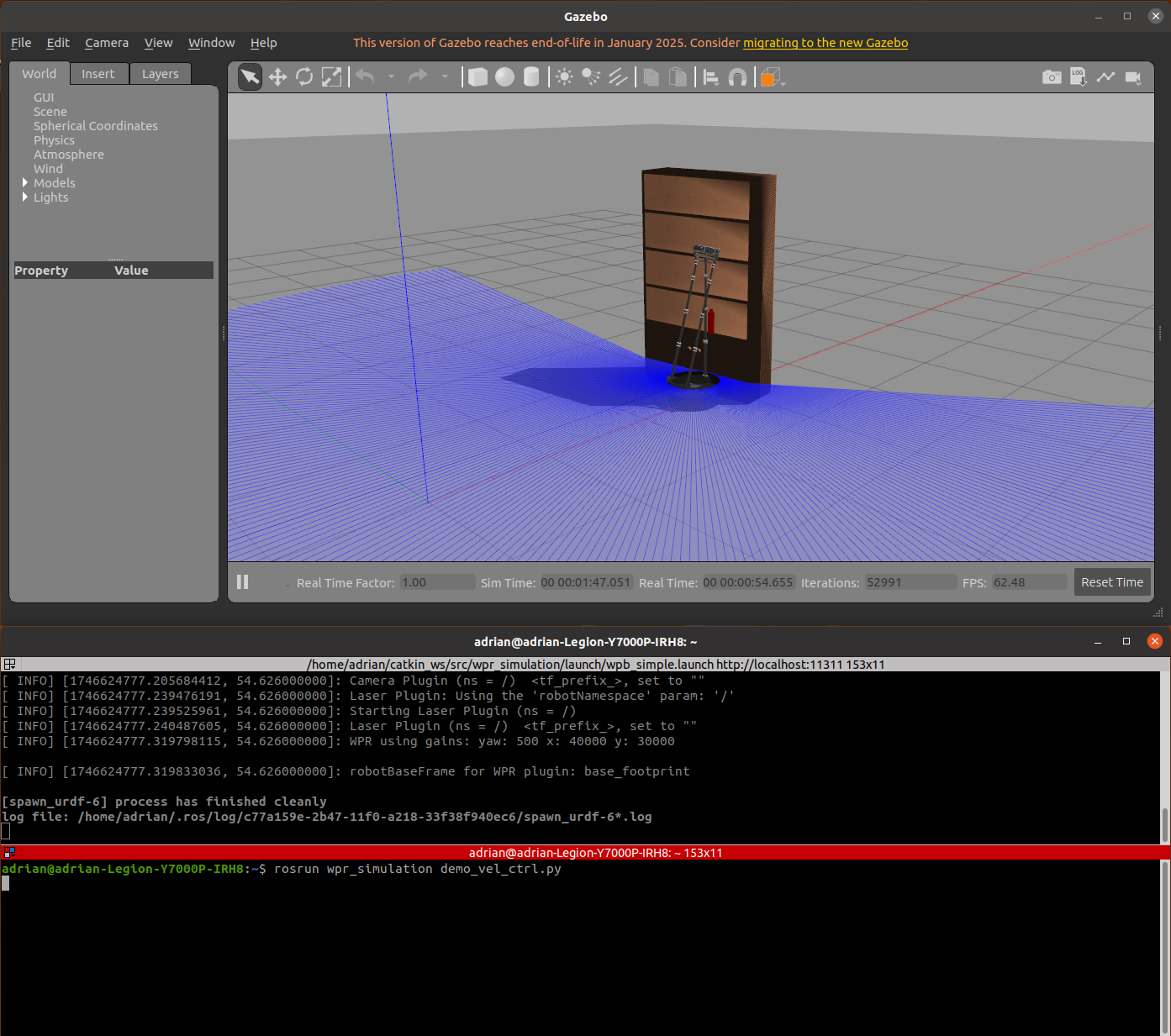
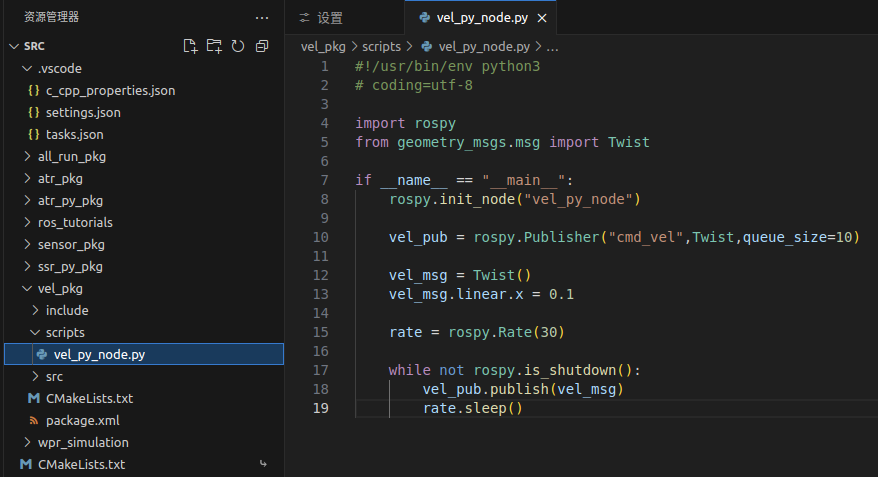
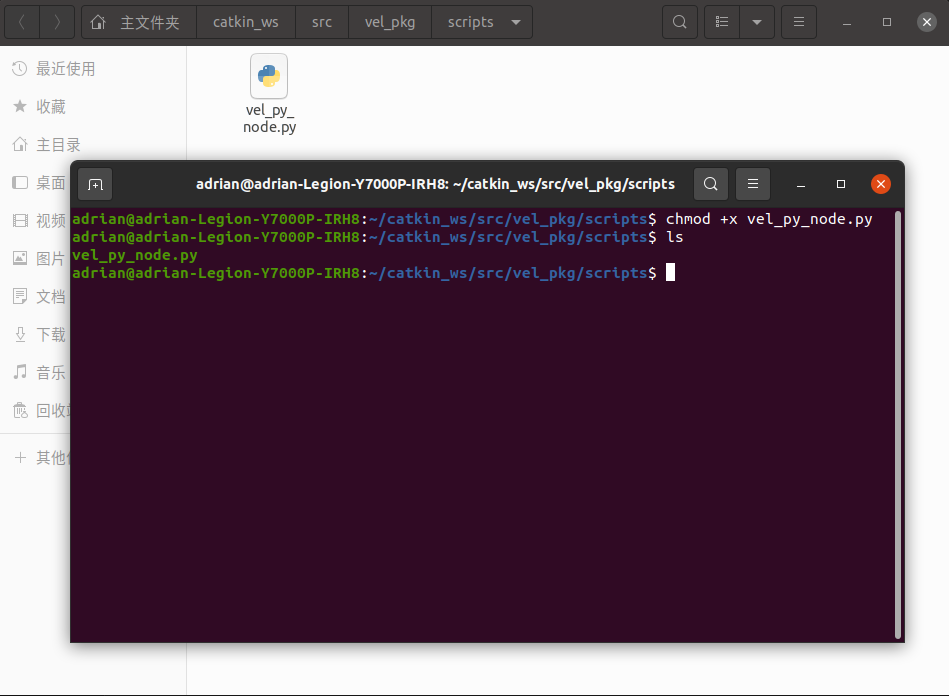
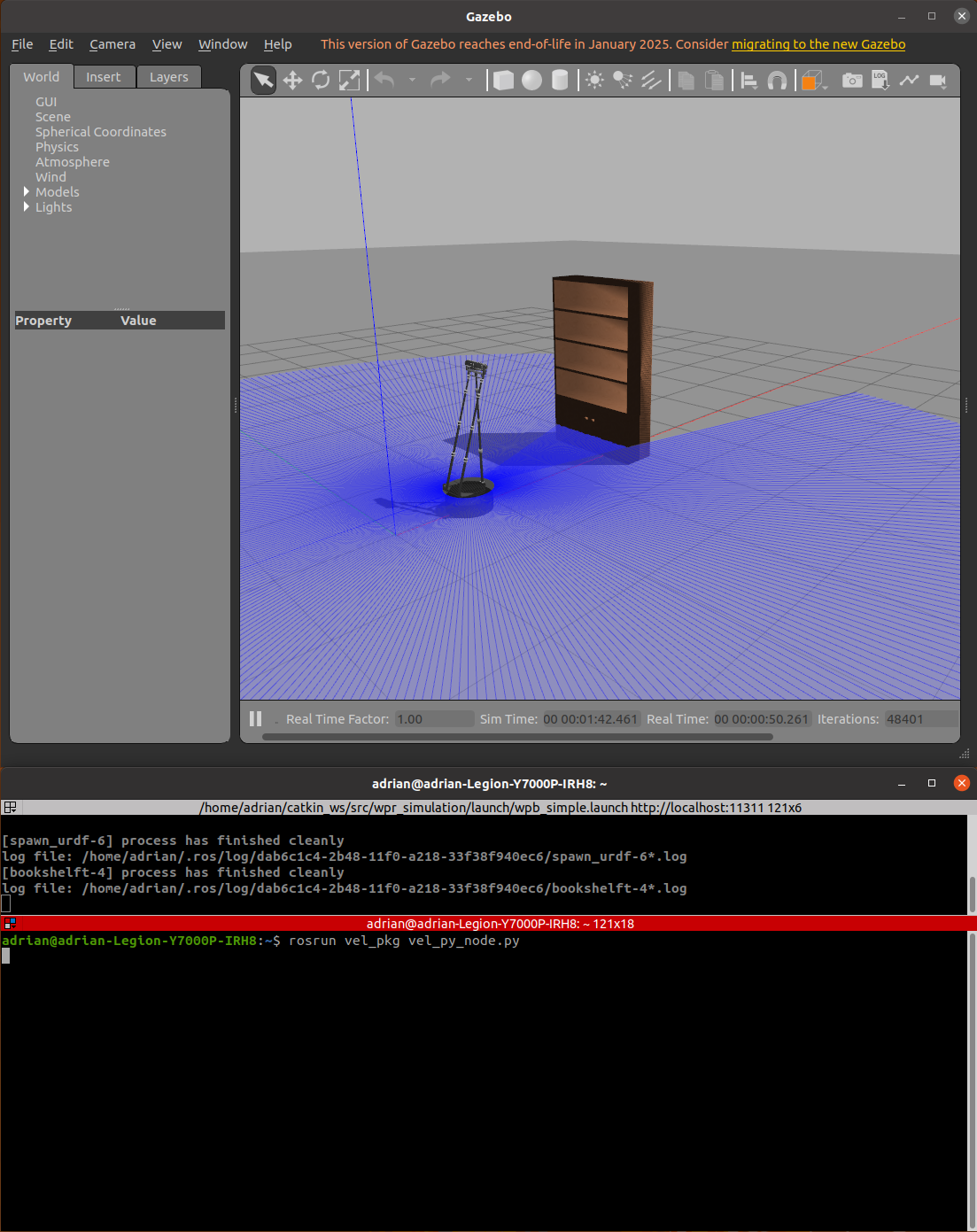
ROS—— 八、机器人运动控制Py实现 2025-5-07 21:46 | ROS | 1,402 ・控制简介 其中的 geometry_msgs 具体见链接中内容 上图为Twist类型消息包内容 ・wpr_simulation 仿真包 wpr_simulation仿真软件下载见 ROS—— 七、机器人运动控制C++实现 启动仿真程序,并运行demo文件,可看到机器人慢慢向前走 ・编写.py程序 在 ROS—— 七、机器人运动控制C++实现完成创建的vel_pkg中,新建scripts文件夹,在该文件夹中新建vel_py_node节点 编写程序如下: ・修改.py文件权限 文件名变绿即变为可执行文件 ・运行节点 代码可在我的github库中拿取 赞赏