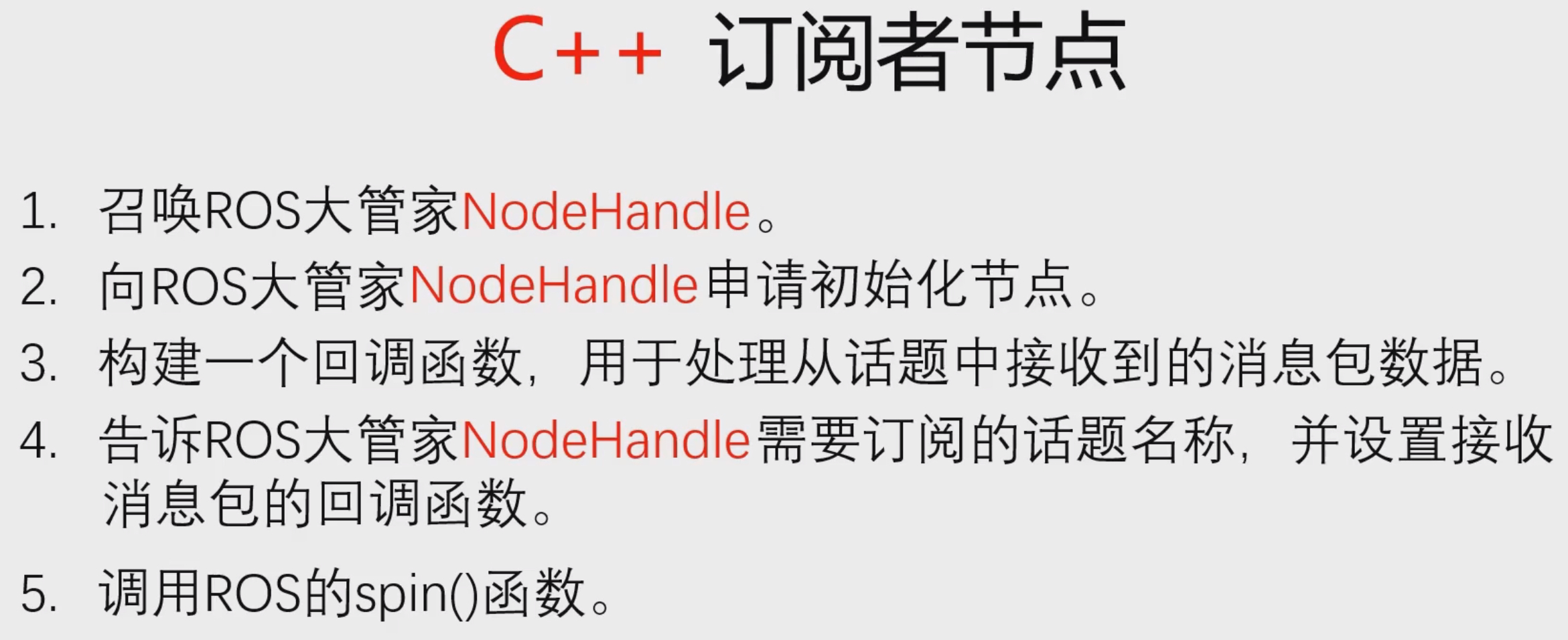
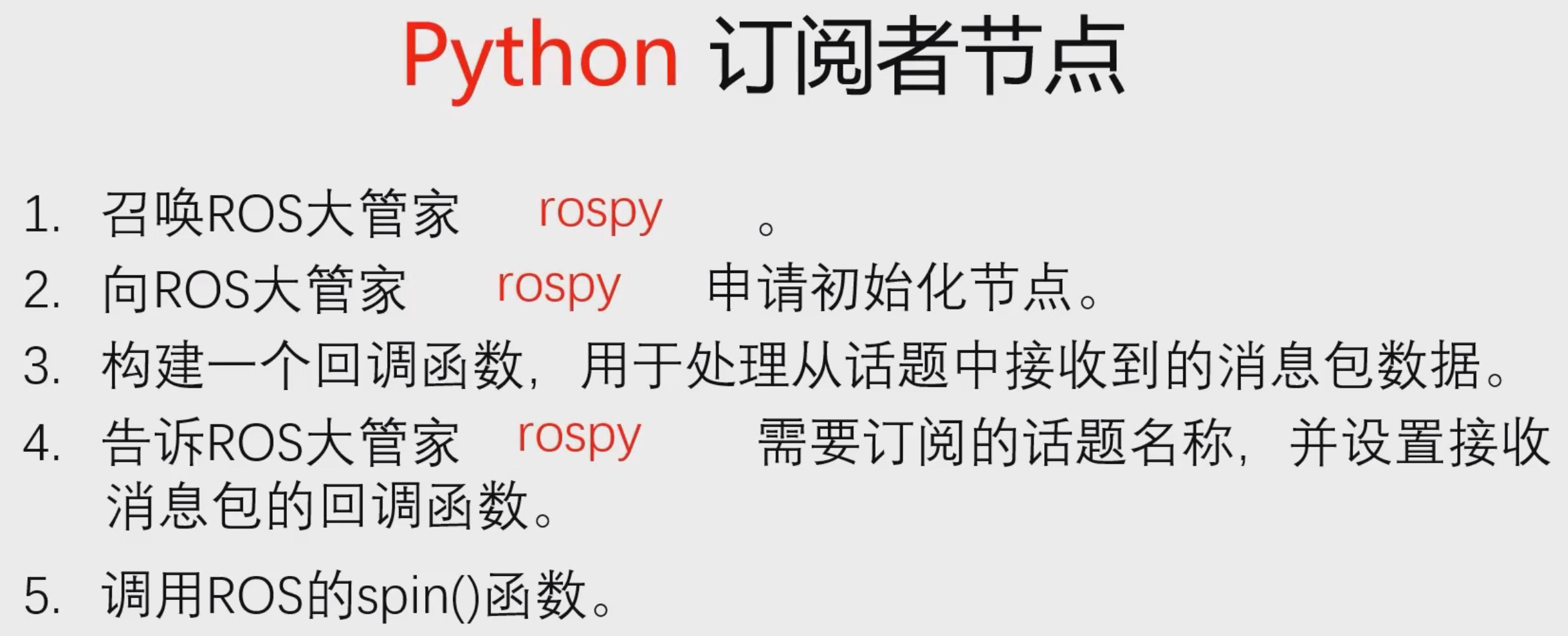
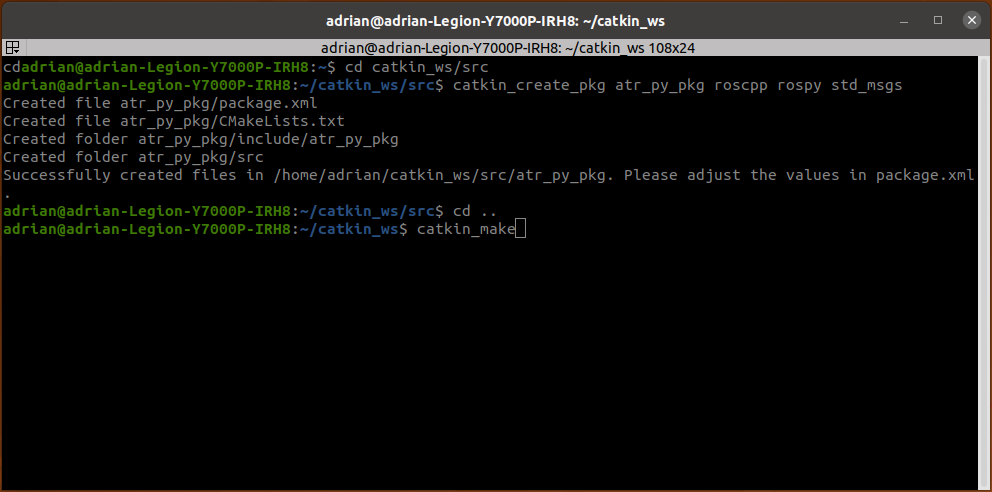
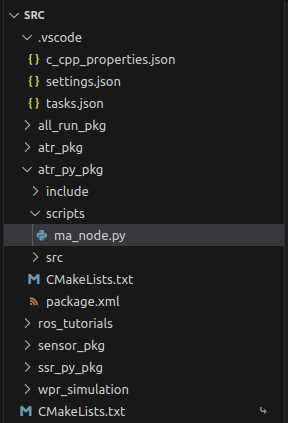
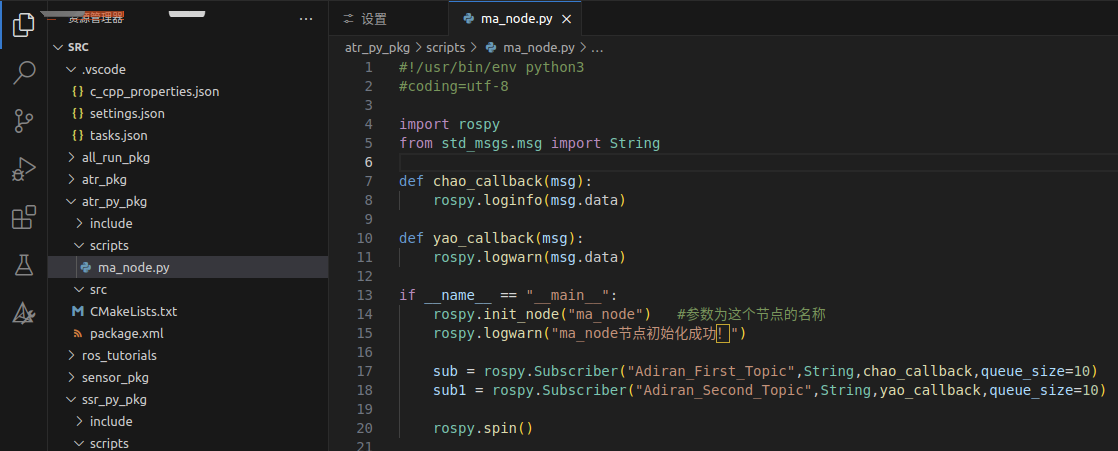
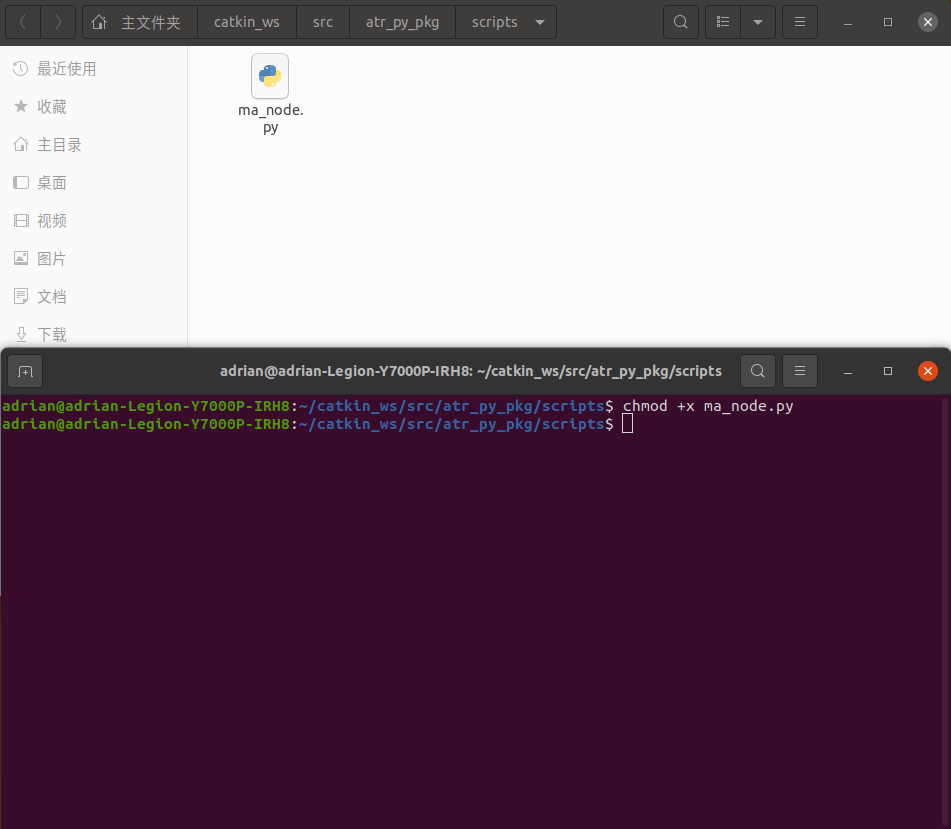
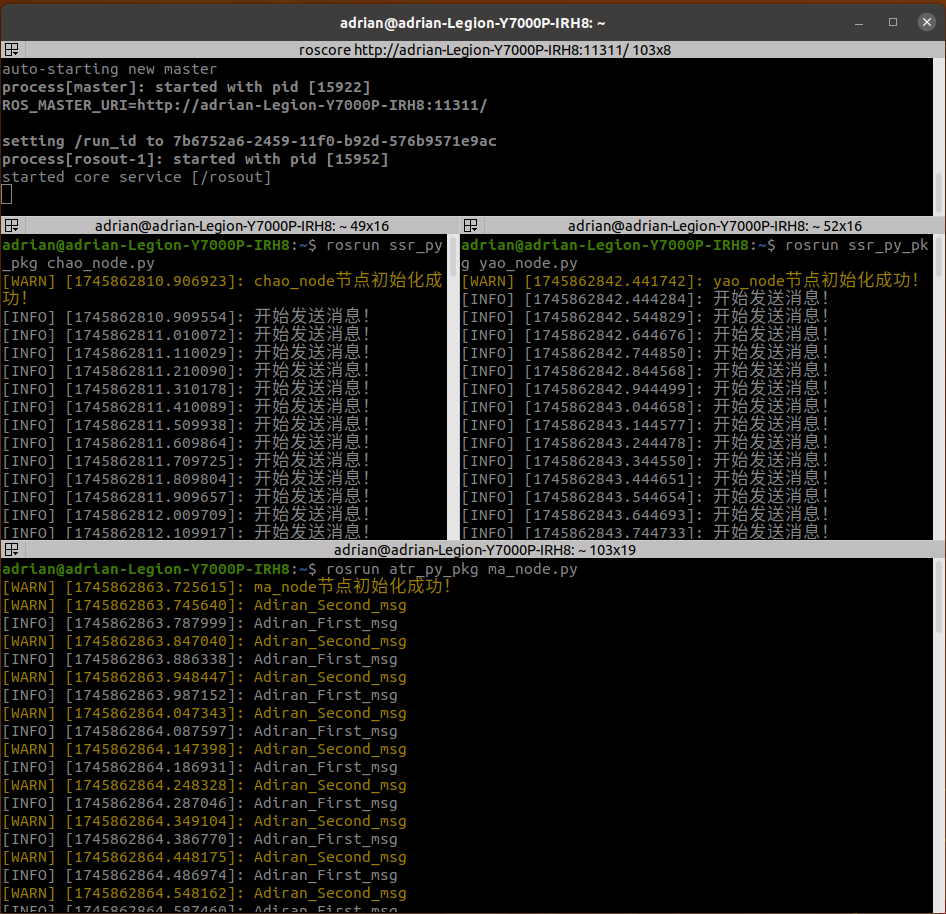
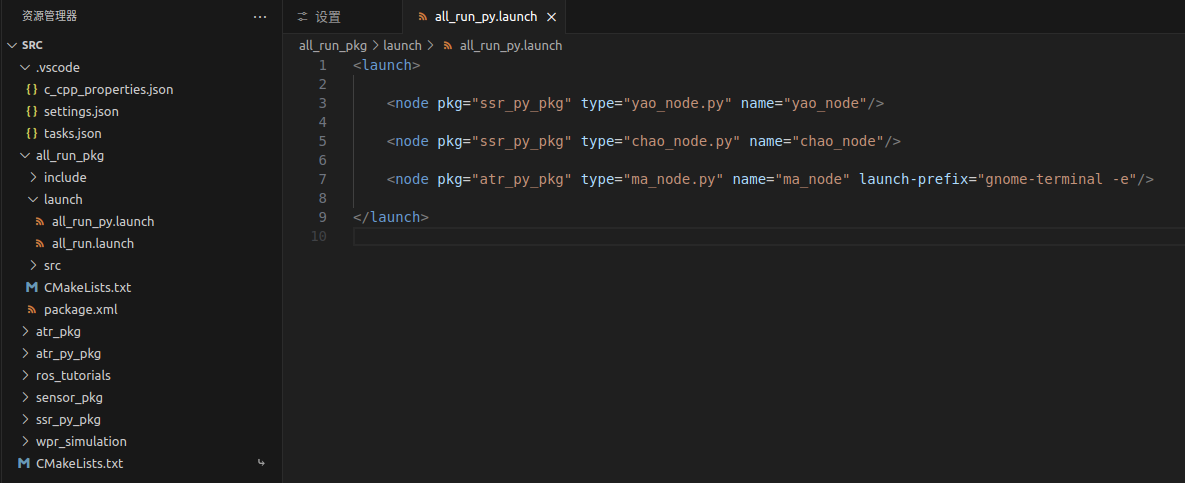
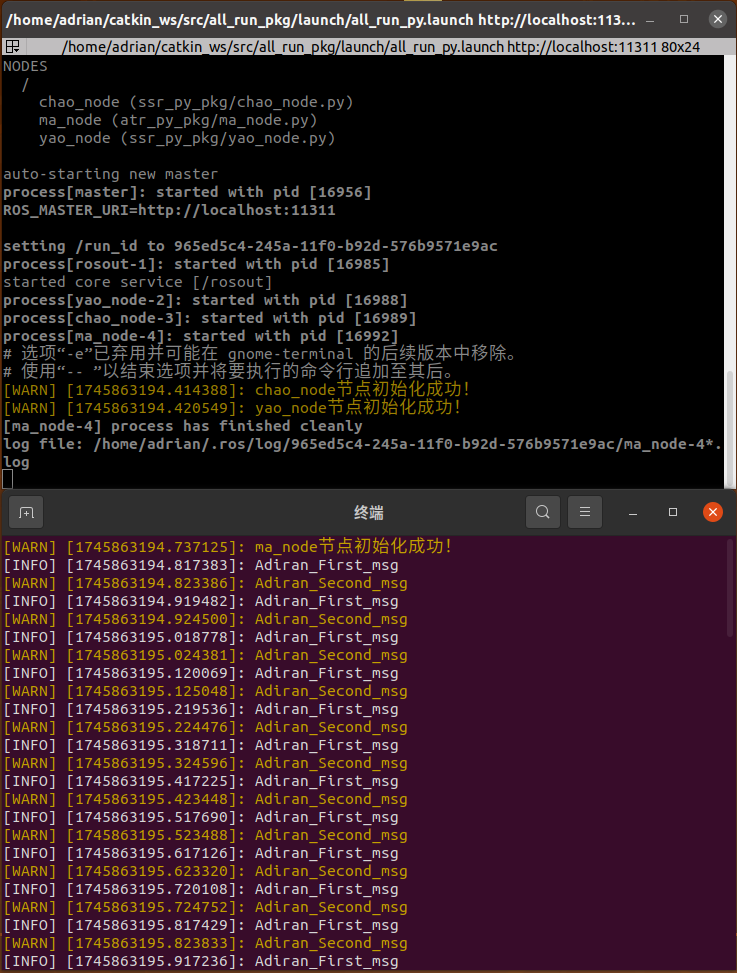
ROS——六、Subscriber订阅者py实现 2025-5-06 15:17 | ROS | 1,222 ・订阅者节点创建流程( 与Cpp流程的异同 ) ・使用 catkin_create_pkg 创建一个软件包 具体步骤见ROS —— 一、创建Package包与Node节点 【 创建完成后进行编译 】 如图所示,在atr_py_pkg下创建scripts文件夹,py的节点文件都存放在这个文件夹中 ・编写 .py 程序 ・改变 .py 文件权限 ・运行节点 ・编写launch文件,一次启动多个节点 具体步骤见ROS——四、launch文件一次启动多个节点 【 运行launch文件 】 代码可在我的github库中拿取 赞赏