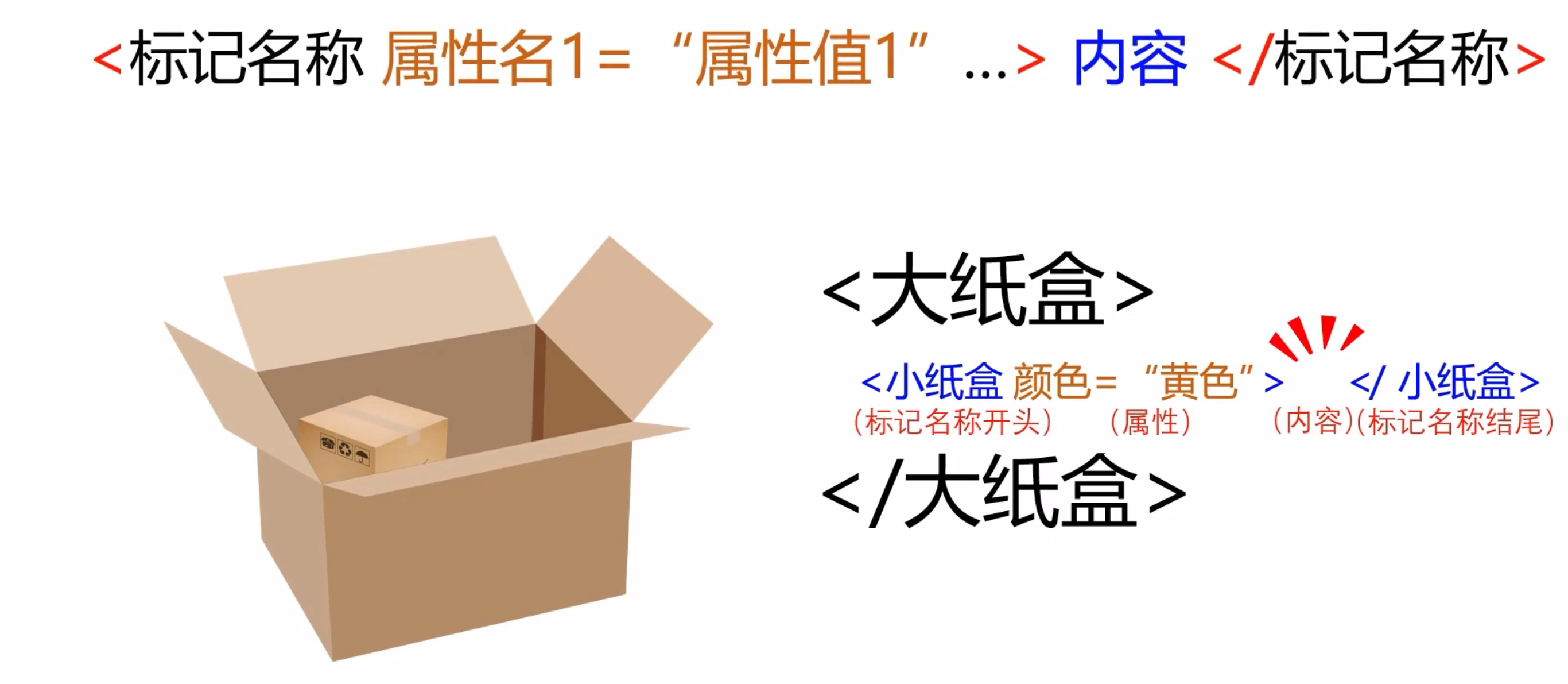
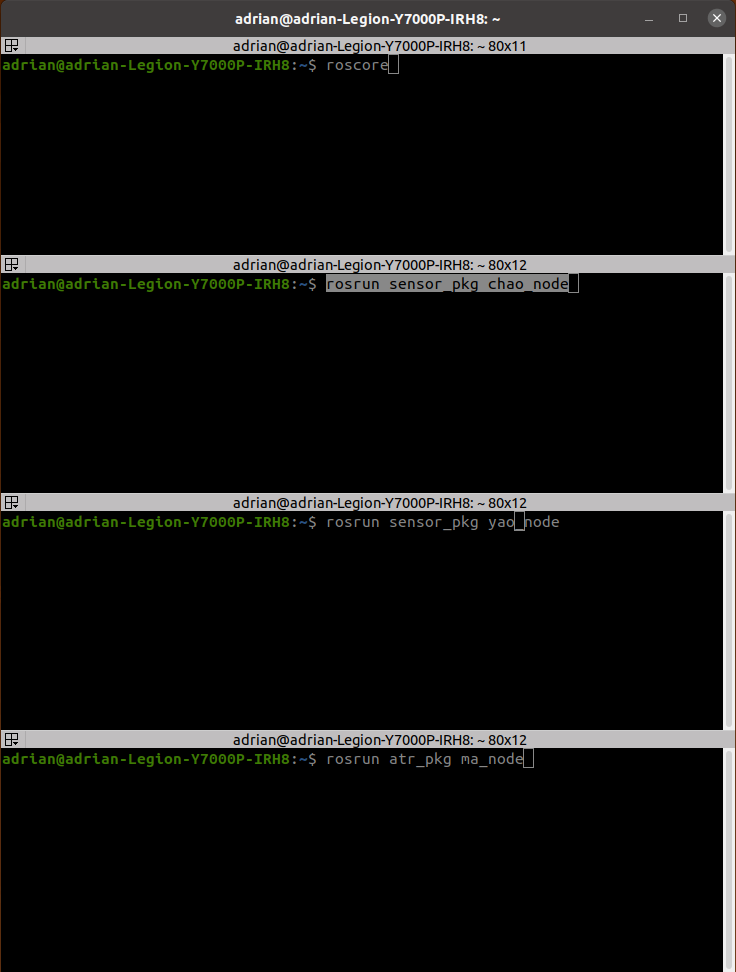
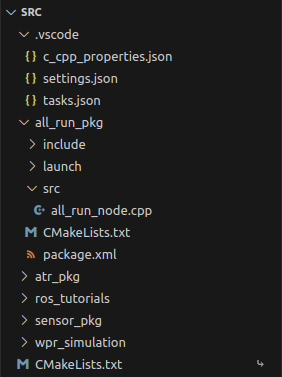
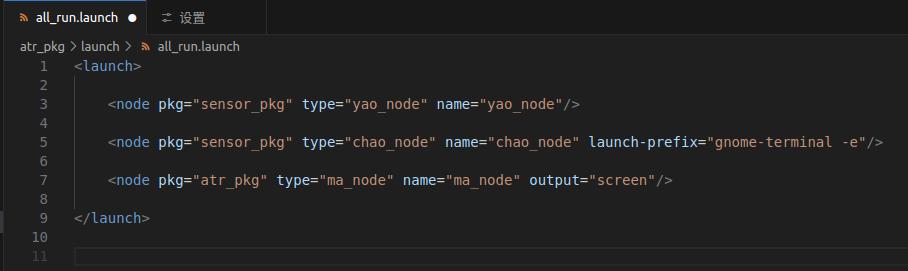
ROS——四、launch文件一次启动多个节点 2025-4-25 21:14 | ROS | 1,438 ・XML语法 ・编写launch文件 若想要启动多个节点,需要开非常多的终端,十分麻烦 因此用launch文件来一次启动多个节点,首先创建all_run_pkg包,具体流程如 ROS —— 一、创建Package包与Node节点 中所示 注意!all_run_node.cpp文件中也需要进行节点初始化,不然编译会不成功!具体文件见github 在all_run_pkg目录下创建launch子目录,并在其中添加all_run.launch文件 内部编写程序如下: 运行结果: —— output = " screen " 可以让节点的输出信息显示在终端中(ROS_WARN不受影响,可以自行删除查看) ——launch-prefix = " gnome-terminal -e " 可以让一个节点运行在一个独立终端中,方便查看 代码可在我的github库中拿取 赞赏